- Eesti Vabariik
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Muutuva sageduse ajamid: tööpõhimõtted, juhtimismeetodid ja rakendused
Kataloog
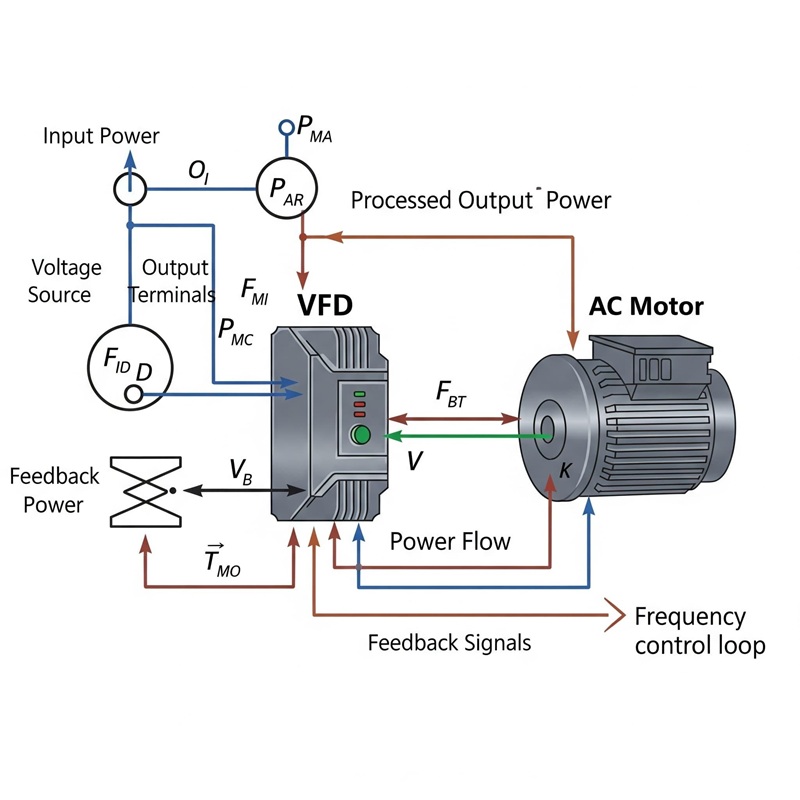
Muutuva sageduse ajam (VFD) Ülevaade
Muutuva sageduse ajam (VFD) on võimsuselektronikaseade, mis reguleerib AC mootori kiirus ja pöördemomenti, muutes statoripinge sagedust, samal ajal kohandades väljundpinget ja voolu, et mootori magnetvoog ja pöördemomendi tekitav vool püsivad töösõbralikus vahemikus. Tootmisplatsil avaldub see vähem kui lihtne "kiiruseseade" ja rohkem kui distsiplineeritud pöördemomendi ja voolu regulaator, mis juhtub tootma soovitud kiirus, kui mootori terminalide elektrilised tingimused on kontrolli all.
Enamik AC mootoreid määravad elektriline sagedus suuresti pöörleva magnetvälja kiirus ja mootori kiirus, kusjuures induktsioonimootori libisemine loob väikese erinevuse nende kahe vahel. Kui sagedus muutub, kohandab ajam pinget, et säilitada õige magnetvoog. Liigne voog võib vähendada pöördemomenti ja reaktsiooni, samas kui liiga palju voogu võib suurendada voolu, soojust ja müra.
Paljudel kaasaegsetel ajamitel juhtivad mootori voolu otseselt, et säilitada stabiilne pöördemoment madalatel kiirusel, ootamatute koormuse muutuste korral või kui mootori omadused muutuvad temperatuurimuutuste tõttu.
Käivitamise ja tõrgete otsimise käigus on tavaline tunda, et sageduse juhtimine peaks kõike selgitama, kuni esimene kiire kiirendus, järsk aeglustamine või koormuse šokk paljastab puudujäägid. Igapäevase töö kvaliteedi erinevused ajamite vahel ilmnevad tihti voolu mõõtmise kvaliteedis, vooluringi häälestuses ning selles, kui sujuvalt ajam transiente haldab, mitte niivõrd põhjasageduse käsus endas.
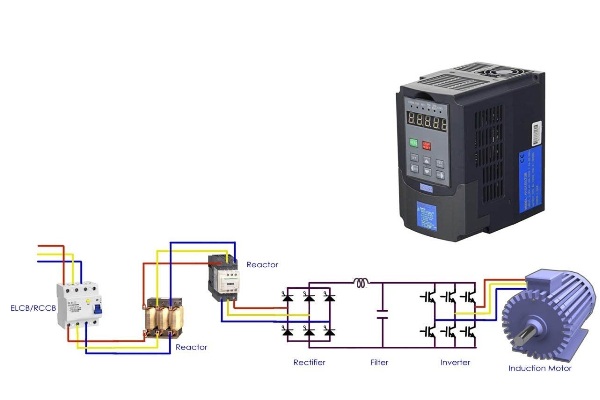
Enamik tööstuslikest VFD-dest kasutab AC–DC–AC struktuuri, kuna see on tavaliselt vastupidav, kulutõhus ja kohandatav laias valikus mootori tüüpe ja tööprofiile.
Eesmine suunaja muundab sissetuleva AC DC-ks. Kõige levinum rakendus kolmes faasis on 6-diodi sild. Ligikaudne koormusteta DC bussitaseme väärtus on:
VDC ≈ 1.414 × VLL
Näited, mida sageli näha väljapanekute mõõtmistes:
• 380 VAC kolmefaasiline → ~537 VDC
• 220 VAC ühefaasiline → ~311 VDC
Diodisild on lihtne ja usaldusväärne, kuid see tõmbab mitte-sinusoidset voolu vooluvõrgust, mis võib tekitada harmoonilisi häireid ja suurendada nõrkade vooluvõrkude stressi. Mõnedes installatsioonides võivad probleemid, nagu häirivad seiskumised, transformaatori kuumenemine või ebastabiilne töö, olla tingitud harmooniliste voolude ja liini impedantsi interaktsioonist, mitte mootori ennast.
Tavalised leevendamisvõimalused tööstuslikes paneelides:
• Liinireaktorid (AC choke'id)
• DC-link choke'id
• EMI/RFI filtrid
Alternatiivid muundajatele, mida mõnikord valitakse ja spetsiifiliste käitumiste jaoks:
• SCR (thyristor) alaldid piiratud kontrollitud laadimise jaoks (nüüd uutes ülesehitustes vähem levinud)
• Aktiivsed esiosad (AFE), mis kasutavad IGBT-sid, et parandada võimsustegurit, vähendada harmoonilisi ja võimalikku regeneratsiooni võrku
Praktiline viis alaldite otsuse raamistamiseks on see, et see määratleb, kuidas drive koos toitevõrguga hakkama saab. Üllatav arv probleeme, mille tõttu esialgu süüdistati mootoreid, selgub lõpuks, et need tulenevad sisestuspoole ühilduvusest ja liinitingimustest.
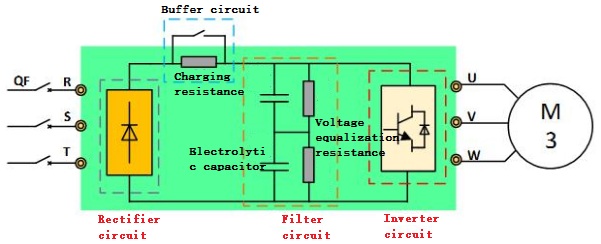
Energiseerimisel näevad DC-link kondensaatorid esialgu välja nagu lühis. Ilma sisselaske kontrollita võivad alaldid ja ülemine kaitse näha äkilist vooluhoogu, mis näib süsteemile kõva löögina. Enamik drive'e tegeleb sellega eelaadimisrajaga, mis piirab voolu, kuni buss laeb, ja seejärel üleminekuga normaalsele töörežiimile.
Tüüpilised eelaadimise elemendid:
• Sarjas takisti DC bussil käivitamisel
• Ümbersuunamise kontakt või relee, mis sulgub pärast kondensaatori pinge tõusu
Reaalsetes paigaldatustes esinevad eelaadimise vead sageli kui juhuslikud käivitamisvead, laadimise ajaülevaadetega häired või kontaktori krahhid. Tavalised põhjused hõlmavad vananevaid eelaadimise takisteid, kulunud ümbersuunamis kontakte ja madalpinge tingimusi käivitamisel, mis takistavad draivi laadimisprotsessi õigesti lõpetamast.
DC-link silub alaldite rippel ja pakub lühiajalist energia salvestamist, kui koormus muutub kiiremini, kui allikas suudab reageerida. See sisaldab tavaliselt mitmeid elemente, millest igaühel on erinev roll, mitte ühte "üks komponent parandab kõik" lahendust.
Tüüpilised DC-link komponendid:
• Elektroliitilised kondensaatorid
• Ülevoolu ja/või tasakaalustavad takistid
• Mõnikord filmkondensaatorid kõrgsagedusliku rippel suppressiooniks
Kõrgemate bussipingete korral võivad kondensaatorid olla ühendatud järjestikku. Kuna tõelised kondensaatorid ei jagada pinget ideaalselt, lisatakse tasakaalustavad takistid, et vähendada ebaühtlast pinget jaotust, mis kiirendab vananemist ja võib tõukuda ühe kondensaatori enne aeglase rikke režiimi. Teenindustöös võib drive jätkata töötamist halvenenud kapatsitiivsusega, mis võib olla petlikult rahustav; siis hakkab see reageerima järsult liinide sageduste, regeneratsiooni juhtumite või kiire koormuse muutustele. See "tolerantsi" muutus on sageli esimene vihje, et DC-linki tervis on halvenemas.
Paljude kohtade vahel saavutab DC-link kondensaatorite komplekt kasutusaja lõpu varem kui IGBT-d, mitte seetõttu, et kujundus oleks halb, vaid seetõttu, et soe ja rippel-voolu stress koguneb vaikselt aja jooksul. Seetõttu tasub õhuvoo juhtimise, kõrge keskkonna temperatuuri korral alandamise ja mõõdukate kande sageduste valik sageli tagasi vähem seletamatuid katkestusi ja vähem keskealisi draivi uuendusi.
Inverteri sild sünteesib kontrollitud kolmefaasilise väljundi DC bussilt, kasutades tavaliselt IGBT-sid, mida juhib PWM. IGBT-de vastupidised dioodid pakuvad vooluteed lülitusüleminekute ajal ja toetavad voolu järjepidevust, kui mootori induktiivsus "nõuab" voolu voolamist.
PWM võimaldab tihedat kontrolli, kuid genereerib ka kiireid pingekaldeid (kõrge dV/dt). Lülitus (kandja) sageduse suurendamine vähendab sageli kuuldavat müra ja voolu rippel, samas kui see suurendab lülituskadu ja sisemist kuumenemist. Praktiliselt hõlmavad seadistused kompromisse, mida operaatorid saavad kohe tunda, rahulikkus mootori küljel võrreldes temperatuuri marginaaliga draivi sees.
Tavalised töötoimingute kompromissid:
• Madalam kandjasagedus: jahedam draiv, rohkem mootori akustilist müra ja pöördemomendi rippel
• Kõrgem kandjasagedus: vaiksem mootor, kuumem draiv, rohkem stressi komponentidele aja jooksul
Kaabli pikkus ja mootori vanus võivad suruda väljundnõuded suunas, mis üllatab inimesi, kes vaatavad ainult nimivõimsust. Pikad juhtmed ja vanemad isolatsioonisüsteemid võivad vajada täiendavaid meetmeid.
Tavalised väljundi külgsuunalised täiendused ja praktika:
• dV/dt filtrid või siinfiltrid
• Õige maandamine ja varjestatud kaabli praktikad, et vähendada laagri voole ja EMI probleeme
Kui mootor aeglustub või koormus külvab mootori (üleviimise tingimus), võib masin genereerida energiat tagasi DC bussile. Bussipinge tõuseb ja draivil on see energia suunata või hajutada, et vältida DC ülevoolu katkestust. See on üks selliseid käitumisi, mis võivad tunduda juhuslikud, kuni energia vool on selgelt nähtav: inerts ja kiirusprofiili valikud domineerivad sageli tulemust.
Tavalised meetodid regeneratiivse energia käsitlemiseks:
• Dünaamiline pidamine (pidurite chopper + takisti): muundab regen energia soojusteks; laialdaselt kasutatav, kuna käitumine on ettearvatav ja seadmed on lihtsad
• Regeneratiivne esiosa (AFE või eraldi regenüksus): tagastab energia võrku; sageli valitud, kui pidurid on sagedased või kui energia taaskasutamine sobib töö eesmärkidega
• Pikemad aeglustusramid: vähendavad tipptaseme regen võimsust; mõnikord piisav, et vältida pidurite seadmeid lisamist
Riketehnika lahendamisel lõppevad DC ülepinged sageli pärast aeglustusaega, kui see on leevendatud või pidurdustehnika on dimensioneeritud vastavalt tegelikule inertsusele. Tihti jääb tähelepanuta, kui agressiivselt on kiirusprofiil konfigureeritud koormusesse salvestatud mehaanilise energia suhtes.
VFD kontroll varieerub lihtsatest skalaarsetest lähenemistest kiire voolu reguleerimise meetoditeni. Masina "tunne", eriti madalal kiirusel või koormuse sammude ajal, sõltub suuresti sellest, millist kontrolliperet kasutatakse ja kui hästi mootori mudel vastab tegelikkusele.
V/Hz hoiab umbkaudu konstantselt pinget sageduse suhte. See sobib sageli ventilaatorite ja pumpade jaoks, kus pöördemomendi nõudmine on mõistlikult prognoositav ja dünaamika on tagasihoidlik. Kohtades, kus see kipub näitama oma piire, on madala kiirusel pöördemomendi jäikus ja reageerimine äkiliste koormuse muutuste ajal, kus süsteem võib tunduda veidi ebatäpne või viivitav.
Vektorjuhtimine (FOC) ja DTC kasutavad voolu/pinge tajumist ja kiiret arvutamist (CPU/DSP), et reguleerida fluksi tootev ja pöördemomenti tootev voolukomponente. Tulemus on enesekindlam pöördemomendi reageerimine, eriti nullkiirusel ja kiirete transiitide ajal, ja kiirusregulatsioon paraneb veelgi, kui kasutatakse kodeerija tagasisidet.
Üldiselt seostatavad tulemused nende meetoditega:
• Tugevam madala kiirusel pöördemomendi käitumine
• Kiirem reageerimine koormuse muutustele
• Tõhusam kiirusregulatsioon, eriti koos kodeerija tagasisidega
Paljudes paigutustes aitab automaatne häälestamine parandada jõudlust, kohandades juhtimismudelit mootori tegelike elektriliste omadustega, selle asemel, et tugineda vaikesätetele. See toob sageli kaasa täpsema ja stabiilsema mootori juhtimise.
VFD muudab rohkem kui ainult RPM. See mõjutab mootori termilisi omadusi, mehaanilisi laadimismustreid ja ülesvoolu energia kvaliteeti ning need kõrvaltoimed kipuvad ilmnema pärast muutuva kiirusest tekkivat uudishimu.
Tihti tähelepanuta jäävad süsteemi tasandi mõjud:
• Mootori jahutus madalal kiirusel: telje ventilaatorid liiguvad vähem õhku; pideva pöördemomendi madala kiirusel töö võib nõuda eraldi toidetud puhurit või inverteri tööde jaoks hinnatud mootorit
• Mehaanilised pingemustrid: sujuvam kiirendamine võib vähendada šokilaadimist, samas kui agressiivsed pöördemomendi piirangud võivad kaasa aidata vöö libisemisele, ühenduste pingele või resonantsile
• Energia kvaliteet: dioodi esivedrud tutvustavad harmonilisi; mitu mootori juhtimisüsteemi ühisel toitel võivad vajada kooskõlastatud heidutust
• Kaitse ja ohutus: integreeritud rike tuvastamine (ülekuuluvus, üle/alla pinge, ülekuumenemine, maandusviga) ja funktsioonid nagu Ohutu Pöördemoment Off (STO) muudavad süsteemide juhtimise, valideerimise ja hooldamise viisi
Stabiilisi tulemusi saavutatakse harva, kui kõik jäetakse vaikeseade juurde ja loodetakse, et protsess on õrn. Ennustatavus tuleb tavaliselt lühikesest, meetodlikust seadistusritmist, mis on vähem dramaatiline kui kangelaslik rikete kõrvaldamine, kuid oluliselt rahuldust pakkuv, kui masin töötab puhtalt vahetusest vahetusse.
Seadistamise kontrollnimekiri, mis sageli tasub end käivitamisel ära:
• Sisestage täpsed mootori andmeplaadi andmed (pinge, vool, sagedus, kiirus ja võimsustegur, kui juhtimisseade seda nõuab)
• Valige juhtimisrežiim, mis sobib koormuse profiiliga (ventilaator/pump, pidev pöördemoment või kõrged dünaamikad)
• Seadke kiirendamine/aeglustamine, tuginedes inertsusele ja pidurdusvõimele, mitte isiklikele eelistustele
• Valige kandjafrekvents, mis kajastab nii müraootusi kui ka termilist peavarju
• Kontrollige maandust, kaabli tüüpi ja kaabli pikkuse praktikaid, enne kui jahtida katkestusi või "fantoom" rikete
Tootlik vaimne mudel on käsitleda VFD-d energiatee süsteemina, millel on kolm erinevat ülesannet: kujundada sisendvõimsust liini poole, puhverdada energiat DC lingis ja reguleerida mootori voolu väljundpoole. Kui seda voolu hoitakse silmas, kipuvad korduvad probleemid, DC ülepinged, nõrk madala kiirusel pöördemoment, ebameeldivad vead ja varajane komponentide vananemine muutuma kergemini selgitamiseks, testimiseks ja parandamiseks.
VFD-de klassifitseerimine
Võimsuse etapi arhitektuuri järgi
VSI ajamid on laialdaselt kasutusel tööstuslikes süsteemides, kuna topoloogia on lihtne ja praktiline. Mehhanism muundab AC sisendi DC bussiks diood silluse või aktiivse esivedrustuse kaudu, seejärel kasutab inverterit, et genereerida muutuva sageduse ja muutuva pingega energiat mootorile. Suured DC bussikondensaatorid aitavad hoida stabiilset pinget ja vähendada pingete varieerumist koormuse muutuste tõttu.
Igapäevases käivitustöös kipub see arhitektuur olema andestav muutuvpöördemomendi koormuste suhtes, nagu pumbad ja ventilaatorid, millepärast jätab see sageli head esmast muljet.
Samal ajal võib jäiga bussi ja kiirete lülitamiste kombinatsioon tõsta dv/dt mootori terminalides, ja see reaalsus muutub raskeks ignoreerida, kui mootori juhtmed muutuvad pikaks või kui vanemad isoleerimisse süsteemid juba elavad laenatud ajal.
Üldised tellimise üksikasjad, mis otsustavad tihti, kas VSI paigaldamine tundub puhas või segane:
• Mootori kaabli pikkus ja suunamine
• Maandamismeetod ja sidumise kvaliteet
• dv/dt või siinusfiltreerimise strateegia
CSI ajamid võtavad erineva seisukoha: suur induktor DC-linkis suunab süsteemi suhteliselt konstantse DC voolu suunas ja väljundetapp kujundab mootori voolu vastavalt. Neid määratakse tänapäeval harvem, kuid nad ilmuvad jätkuvalt kõrgevõimsustes, keskpinge- ja raskesõidukite keskkondades, kus kontrollitud voolu käitumine sobib tehase riskiprofiili ja toimimis kultuuriga.
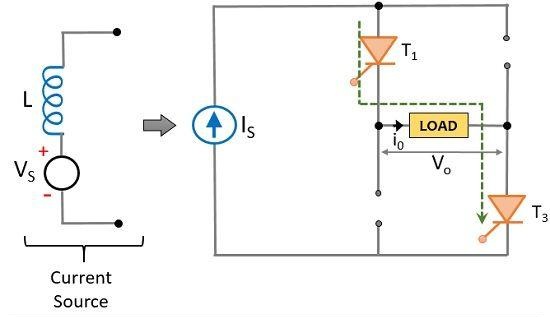
Praktikas kipub CSI kaubeldama mugavust ennustatavuse vastu. Riistvara jalgade ala on suurem, konfiguratsiooniruumi võib tunduda kitsam ning hõlpsasti kergesti kergesti saadaval olevate osade ja tehnikute ökosüsteem on väiksem, kui enamus meeskondi oodata VSI-ga. Siiski, rakendustes, mis vastavad CSI tugevustele, võib stabiilsem voolu käitumine tunduda lohutav, eriti kui sait hindab konservatiivset elektrilist stressi ja vastupidavat toimimist kompaktsete omaduste üle.
Tüüpilised CSI kaubeldavad, mis kujundavad reaalseid projekte:
• Suurem füüsiline suurus ja kõrgem süsteemi keerukus
• Vähem tavapäraseid teenusevalikuid ja varuosade võimalusi
• Tugev seos teatud MV ja raskete töökoormuse juhtudega
Juhtimisdiskussioonid keskenduvad sageli inverterile, kuid esiriga on sageli see, mis otsustab, kuidas süsteem käitub tehase bussis ja pidurdamise ajal. Dioodi esiriba on lihtne ja eelarvesõbralik, kuid see tõmbab mitte-sinusoidset sisendvoolu ja tavaliselt ei saa see energiat võrku tagasi saata. AFE võib parandada sisendvõimsuse tegurit, vähendada harmoonilisi ja toetada regeneratsiooni.
See eristus muutub valusalt ilmseks protsessides, kus on sagedane peatumine või koormuse üleviimine. Kui masin kordub korduvasti DC-bussi ülepingestumise tõttu kiiretel peatustel, on ahvatlev süüdistada häälestamist, kuid ebamugav tõde on sageli energia käitamise mismatch: energia tuleb tagasi kiiremini, kui süsteem suudab seda imada või tagasi saata.
Esirea ja energiakäitlemise võimalused, mida sageli valitakse välitingimustes:
• Dioodi esiraud
• Aktiivne esiraud
• Piduriresistor / dünaamiline pidurite lõikaja
• Regeneratiivne seade või jagatud DC bussi lahendused
• Pikem aeglustumise ramp, mis on kooskõlas protsessi taluvusega
Klassifikatsioon lülitamise ja modulatsiooni meetodi järgi
Vanemad ajamid tuginevad mõnikord PAM-ile või varasematele modulatsiooni strateegiatele, mis on seotud pärandvõimsuse seadmete ja juhtimisseadmetega. Need süsteemid esinevad endiselt pikaealistes seadmetes ja need võivad töötada usaldusväärselt, kuni elutsükli toetus hakkab tunduma nagu arvamus. Võrreldes kaasaegsete PWM lähenemisviisidega, jäävad nad tavaliselt tootlikkuse, akustilise käitumise ja kontrollitavuse osas maha.
Hoolduse seisukohalt on emotsionaalne "pingepunkt" harva jõud, see on ebakindlus. Kui asenduskomponendid muutuvad haruldaseks ja dokumentatsioon on õhuke, keskendub moderniseerimise planeerimine tihti kaasaegsete PWM ajamite kasutusele võtmisele, jäädes samas austama olemasolevaid mootoreid, kaableid ja protsessi piiranguid.
PWM on tänapäeva standard, kuna see pakub paindlikku kontrolli pingel ja sagedusel ning toetab kontrolli režiime, mida enamik meeskondi tänapäeval ootab. Ruum-vektor PWM on laialdaselt kasutusel, kuna see parandab DC-bussi kasutust ja võib vähendada suurte mootorite voolu harmoonilisi moonutusi.
Üks operatiivne detail, mida kogenud tehnikud õpivad alandlikult käsitlema, on see, et PWM lainekuju kvaliteet tuleb alati koos arvega. Puhtam vool nõuab tavaliselt rohkem lülitustegevust, ja see suurendab lülituskadu ja termilist koormust. Parimad tulemused tulevad tavaliselt välja, kui tasakaalustada kandelsagedust, termilist ruumi ja kuuldava müra sihte, mitte jahvatada ühte parimat nupu seadistust.
Tavalised PWM konfiguratsiooni kangid, mida vahetatakse pidevalt üksteise vastu:
• Kandersagedus
• Termiline serv ja soojusvaheti/fänni võimekus
• Kuuldava müra ootused
• Mootori voolu loksumine ja pöördemomendi loksumise taluvus
Kandersageduse suurenemine vähendab sageli voolu loksumist ja võib lülitusmüra nihutada üle kõige tundlikuma kuuldava vahemiku. Asustatud ruumides võib see muudatus tunduda kergendavana ning teatud masinates parandab see otseselt tajutava tootmis kvaliteeti.
Piirang on soojuse juhtimine. Kõrgem lülitus sagedus suurendab inverteri kaotusi ja see võib sundida ajamit derateerima, tugevama korpuse õhuvoogu või suuremat raami suurust. Paljud väljakutsed, mis ilmnevad kui "salapärane ülekuumenemine", muutuvad palju vähem salapäraseks, kui kandersagedus, keskkonna temperatuur, korpuse piirang ja töötsükkel on koos hinnatud.
Soojusega seotud abinõud, mida sageli kasutatakse kõrge-kandvigü seda stabiliseerimiseks:
• Alandage kandersagedust realistlikule tasemele töötsükliks
• Derateerida väljundvoolu ja muuta ülelaadimise ootusi
• Parandage kohaliku õhuventilatsiooni või soojuse eemaldamise teed
• Liiguta suurema draivi raami suuruse suunas
Keskmise pingega VFD-d kasutavad sageli mitme taseme muundurite topoloogiaid, et vähendada pingetükke ja parandada lainekuju kvaliteeti. Laia bandgap'iga seadmed, nagu SiC ja GaN, suudavad lülituda kiiremini ja tõhusamalt, mis võib tunduda tehnilise võiduna, kuni kiired äärsed tõstavad dv/dt pinget ja elektromagnetilist häiret korraldustes, mis ei ole distsipliini järgi teostatavad.
Praktiline viis selle üle mõelda on see, et kiirem lülitamine võib parandada kontrollitavust, samal ajal kui paigalduse üksikasjad muutuvad nähtavamaks. Kui mootori laagrites ilmneb varane kulumine või kui sensorid hakkavad müra tegema, on põhjus sageli ühise režiimi pinge ja juhtmete/maandamise praktika, mitte juhtimisalgoritmi puudulikkus.
Paigaldamise ja leevendamise punktid, mis sageli määravad tulemusi kiirete äärtega:
• Mootori kaabli valik ja varjestamise lähenemine
• Maandamise ja ühendamise topoloogia
• Väljundi dv/dt filtrid või siini filtrid
• Laagri voolu leevendamine
• EMI-teadlik paigutus ja signaali/võimsuse juhtmete eraldamine
Klassifitseerimine juhtimisfilosoofia järgi
V/Hz juhtimine säilitab pingete ja sageduste vahekorra, mis hoiab mootori voolu töödeldavas vahemikus. See on lihtne, stabiilne paljudes paigutustes ja laialdaselt kasutatud muutuva pöördemomendiga koormuste, näiteks ventilaatorite ja tsentrifugaalpumpade puhul.
See lähenemine paistab silma, kui protsess ei nõua väga madalal kiirusel pingelisi pöördemomendi juhtimist. Võistlusmootorites, õnnestub see sageli, kuna see vähendab häälestuspingutust ja vähendab vale mootori parameetrite tõttu tekkinud kõikumiste võimalust. Kaupmehetasu on mõõdukas dünaamiline vastus, eriti kiirete koormusmuutuste ajal, kus protsess nõuab ja juhib reageerib hiljem.
Vektori juhtimine eraldab pöördemomendi tootmise ja voolu tootmise komponendid, hinnates või mõõtes mootori olekuid. Sensorita vektori juhtimine võib töötada muljetavaldavalt ilma enkooderita, kuid see toetub tugevalt täpsetele mootori andmetele ja mõistlikult stabiilsetele töötingimustele. Suletud silmusega vektori juhtimine lisab enkooderi või resolveri, mille tulemusena paranevad madala kiirus pöördemomendi käitumine, täpsus ja üleminekureaktsioon.
Praktikas jälgivad paljud vektori juhtimise probleemid tagasi parameetritele, mitte teooriale. Nimeplaadi andmed on sageli alguspunkt, mitte lõpp-punkt. Lühike tuvastamisjooks, mõistlikud baas sageduse valikud ja realistlikud voolu piirangud muudavad sageli pehme juhtimise juhtimise, et hoida kiirus ja pöördemoment viisil, mis operaatoreid usaldab.
Vektori juhtimise seadistamise punktid, mis tavaliselt otsustavad jõudluse:
• Kinnitatud mootori nimeplaadi andmed
• Mootori ID / autotune tulemused ja nende usaldusväärsus
• Baassageduse valik, mis on kooskõlas mootori kujundusega
• Praegused piirangud ja pöördemomendi piirangud, mis on seotud mehaanika
DTC reguleerib pöördemomenti ja voolu otsesemalt, võimaldades väga kiiret pöördemomendi reageerimist rakendustes, kus on teravad üleminekud ja nõudlik pöördemomendi käitumine.
Otsustuspunkt ei ole harva ainult reageerimise kiirus; see on see, kuidas mehaaniline süsteem seda reageerimist talub. Juht, mis suudab pöördemomenti peaaegu koheselt muuta, võib samuti esile kutsuda resonantsi, kui tõusud ja piirangud on agressiivselt seadistatud. Kõige vastupidavamad seadistused käsitlevad mootori, ühendust, reduktorit ja koormust kui ühte seotud süsteemi ning kujundavad then kiirusprofiilid ja pöördemomendi piirangud vastama sellele, mida mehaanika suudab taluda ilma vastuseisu.
Rakenduspõhised kategooriad
Üldotstarbelised draivid rõhutavad laia ühilduvust ja kuluteadlikku funktsioonide komplekti. Kõrge jõudlusega draivid pakuvad tavaliselt kitsamat voolu juhtimist, rikkamat tagasisidet ja I/O valikuid, suuremat ülepinge võimet ja arenenumaid diagnostikat.
Valiku teadlikkus, mis korduvalt ilmneb tegelikes projektides, on see, et kõrge jõudluse omadused zama aitavad, kui protsess nõuab korduvust häirete all, mitte ainult siis, kui mootori reiting on suur. Paljud suured ventilaatorisüsteemid töötavad sujuvalt üldotstarbelise V/Hz peal, samas kui väiksemad süsteemid pingete juhtimiseks, indekseerimiseks või kitsaste kiirusregulatsioonide jaoks, sageli saavad kasu vektori juhtimisest ja tagasiside võimalusest.
Tüüpilised eraldajad draivi klasside vahel hangete aruteludes:
• Ülepinge võime ja soojusmudeli keerukus
• Tagasiside seadme tugi (enkooder/resolver)
• Diagnostika sügavus ja jälgimise tööriistad
• I/O paindlikkus ja integreerimise omadused
Spindli rakendused nõuavad kõrge elektrilise sageduse võimet, stabiilset kiiruskorrektsiooni ja hoolikat mootori kuumutamise käsitlemist suurenenud pöörlemise kiirusel. Need draivid rõhutavad sageli kiiret lülitamise jõudlust ja spetsialiseeritud mootori kaitsefunktsioone, mis on kohandatud spindlitele.
Praktikas kipub jõuvaliku valimine sujuma paremini, kui see arvestab spindlimootori isolatsioonisüsteemi ja laagri strateegiaga, selle asemel, et keskenduda kitsalt tippkiirusel. Kui spindlid ebaõnnestuvad varakult, on juure põhjus sageli termiline juhtimine, määrimine või elektrilised laagri voolud, probleemid, mis võivad olla tüütu, kuna need näivad kontrolli probleemidena.
Spindliga seotud inseneritehnilised kontrollid, mis sageli ennetavad ebameeldivaid üllatusi:
• Mootori isolatsiooni sobivus kiirete servade ja kõrge sageduse jaoks
• Laagri voolu leevendamise lähenemine
• Termilised piirangud soovituslikus kiirusvahemikus
• Jahutuse ja määrimise eeldused reaalses töötsüklis
Ühefaasilised sisendsõidud on levinud kergestisaste industrial ja kaubanduse keskkondades, kuid neid alandatakse sageli, kuna sisendvool tõuseb sama väljundvõimsuse puhul. Kolmefaasiline sisend jaotab tavaliselt sisendvoolu ühtlasemalt ja laieneb mugavamalt, kui võimsus suureneb.
Praktiline paigaldusdetail on ülemise võimsuse planeerimine. Tüütud katkestused ja ülekuumenenud juhtmed jälitavad sageli ühefaasilise sisendvoolu alahindamist, sisselasket käitumise tähelepanuta jätmist või harmoonikute koostoime ignoreerimist kaitse seadmetega.
Ülemised kaalutlused, mis tavaliselt suunavad paigalduse tulemusi:
• Kaitsme/ fuse suuruse ja katkemiskõvera valik
• Kandejõu suurus ja temperatuuritõus torus/korvis
• Sisselasket ja eelkoormuse käitumine
• Harmooniline mõju kaitsele ja ülemistele seadmetele
Funktsionaalne terminoloogia
Enamikul AC mootoritest tuleb kasutatav pöördemoment kiirusvahemikus pinget ja sagedust koordineerides. See koordineerimine asub VFD keskel, isegi kui juhtimismeetod on keeruline. Aluspiirang jääb samaks: mootori voog peab jääma mõistlikesse piiridesse, et vältida nõrka pöördemomendi ühel pool ja ülekuumenemist teisel pool.
Maapinnale suunatud tõlgendus "VVVF" on kui meeldetuletus mootori füüsikast, mitte kaubamärgi etikett. Probleemide korral nõrga pöördemomendi või ootamatu soojuse korral selgus tuleb kiiresti, kui kontrollida, kas käsitletud pinge, käsitletud sagedus ja voolu piirangud tegelikult vastavad mootori tööpunktile ja koormuse nõudmistele.
CVCF kirjeldab reguleeritud energiaallikaid, mis on loodud pinge ja sageduse hoidmiseks stabiilsena, vaimselt sarnane utiliitide tarnimisele. See mudel ei ole suunatud mootori pöörlemise muutmisele.
Kui eesmärk on kiiruskontroll, suunab CVCF mõtte valele suunale. Kiiruskontroll toetub muutuvale sagedusele, ja stabiilne pöördemomendi käitumine järgneb tavaliselt, kui pinget hallatakse samas sammuga sagedusega mootori ja rakenduse piirangute all.
Madalpinge VFD-de juhtimisrežiimid

Miks juhtimisrežiim ikka veel kujundab reaalse maailma tulemusi kaasaegsetes madalpinge sõidukites
Kaasaegsed madalpinge üldotstarbelised VFD-d (tavaliselt 380–690 VAC klass, umbes 0,75–400 kW, 0–400 Hz väljundiga) näevad sageli riistvara vaatenurgast sarnased välja, mis võib meeskondi eksitada ootama masinal sarnast käitumist. Valdkonnas ilmnevad erinevused kiiresti: juhtimisrežiim dikteerib suuresti, kuidas sõit tundub, kui protsess muutub segaseks, külmad käivitused, koormuse sammud, pikad kaablid, marginaalsed mootorid ja operaatorid, kes ei jälgi häälestamist.
See, mida juhtimisstrateegia lõppkokkuvõttes mõjutab, ei ole abstraktne; see muutub päevade jooksul kohustuslikuks, mida hooldus ja tootmine märkavad.
Madala kiirusel pöördemomendi võime; kiirushoidmise täpsus; üleminekureaktsioon koormuse sammudele; akustiline müra; harmooniline moonutus; mootori soojuse/ termiline stress; tundlikkus parameetrite neidle; tundlikkus käivitamise kvaliteedi suhtes.
Praktikas on parim töörežiim tavaliselt see, mis vastab pöördemomendi ja vastuse nõuetele, samal ajal kui see jääb stabiilseks temperatuuri muutuste, koormuse variatsioonide ja mitte-ideaalsete töötingimuste üle. Režiimid, mis saavutavad tõhusalt töötamise ainult katsetuste ajal, võivad hiljem tekitada probleeme, kui pidev häälestamine, müra kaebused või ebastabiilne käitumine ilmnevad mootori asendamise või süsteemi muudatuste järel.
1. generatsioon: SPWM fikseeritud V/Hz (skalaarne juhtimine)
Skalaarne juhtimine hoiab umbes pidevat V/Hz suhet, et mootori õhuvahe vool püsib soovitud tasemel sageduse muutudes. Sinusoidne PWM (SPWM) rakendamine on lihtne, kuluprofiil on sõbralik ja käitumine on tavaliselt stabiilne, kui koormus on sujuv ja kasutatav kiirusvahemik ei ole äärmuslik.
Madala sageduse korral on käskitud staatori pinge endiselt väike. See muudab staatori takistuse languse (I·Rs) ebaproportsionaalselt suureks rakendatud pingega võrreldes, mistõttu voog langeb soovitud tasemest allapoole. Tulemuseks ei ole midagi peen, kui pöördemoment kahaneb, mootori võib koormuse all seiskuda ja mõned seadmed arendavad ebameeldivat "võnkumist" või loksuvat liikumist, mida operaatorid tõlgendavad kui mehaanilist probleemi.
Veel kaks täiendavat mõju süvendavad sageli rahutust nullkiirusel: inverteri surnud aeg ja pooljuhtide pingelangused. Need kaotused vähendavad veelgi tõhusat pinget mootori terminaalides, mis on üks põhjus, miks kaks sama kW-nimeplaadiga sisseseadet võivad hiilides ja positsioneerimisel märgatavalt erinevalt käituda.
Paigaldused, mis järgivad skalaarkontrolli, kuid still soovivad talutavat madalate kiirus käitumist, kuhjavad tavaliselt mitu pragmaatilist kohandust. Igaüks neist võib aidata, kuid igaüks võib ka uue rikkeviisi luua, kui seda liiga palju surutakse.
• Pingetõstmine / IR kompenseerimine: lisab täiendavat madala sagedusega pinget, et kompenseerida I·Rs; parandab stardipööret, kuid agressiivsed sätted võivad mootori ülevoogida ja suurendada kuumenemist.
• Libisemise kompenseerimine: lisab sagedust koormuse voolu funktsioonina, et vähendada induktsioonimootori kiiruslangust; saab pingutada konveiere ja segureid, kuid see võib põhjustada jahusimist, kui mehhaanik on elastne või voolu tagasiside on mürarikka.
• Mitme punkti V/f kõverad: kasutab tükeldatud V/f kujundamist, mitte ühte sirget joont; võib muuta ühe problemaatilise kiirusvahemiku käitumiseks, samas kui mujal ei juhtu suurt midagi.
• +Ramp kujundamine ja voolu piirangud: kohandab kiirendus/dekeleratsiooni ja piiramise käitumist; takistab sageli ebameeldivaid katkestusi kõrge inertsiga koormuste puhul usaldusväärsemalt kui üksainus "võluvits" kompensatsiooniknopp.
Kui rakendus vajab tugevat pöördemomenti väga madalal kiirusel, sagedasi pöördeid või teravat pöördemomendi piiramist, kaldub skalaarkontroll muutuma väikeste täiustuste tsükliks, mis ei näi kunagi lõppenud. Masin võib pärast soojendamist ja pidevat koormust töötada vastuvõetavalt, seejärel kaotada tasakaalu temperatuurimuutuste, mootori vahetuste või kaabli pikkuse muutuste korral, just see on nii muutlik, et teeb tehnikud ettevaatlikuks seadistuse suhtes, isegi kui see näeb paperil hea välja.
Generatsioon 2: SVPWM koos täiustatud skalaarkontrolliga
Ruumi vektori PWM (SVPWM) kasutab inverteri lülitusvektoreid efektiivsemalt kui traditsiooniline SPWM. Praktikas tähendab see kõrgemat DC-bussi kasutust ja madalamat harmoonilist moonutust sama riistvara juures, mis tavaliselt tõlgendatakse suuremate kasutatavate põhipingete, sujuvama voolu ja sageli vähem mootori müra ja kuumenemisenas.
Kui SVPWM on paaritud voolu tagasiside ja madala kiirus pinge/voo kompenseerimisega, siis paljud skalaarsed ajamid tunduvad madalal kiirusel vähem "pehmed" ja hoiavad kiirus tihedamalt mõõdukate koormuse muutuste ajal. Meeskondade jaoks, kes soovivad paremat käitumist ilma käivitamise kultuuri muutmata, võib see järkjärguline täiustamine olla tõeliselt sihiti ahvatlev.
Isegi SVPWM-i korral ei lahuta skalaarkontroll tõeliselt voolu ja pöördemomenti. Pöördemomendi reaktsioon on endiselt vahendatud pingete, voolu ja libisemise vahelise kaudse seose kaudu. Dynaamiliste nõudmiste korral reageerib ajam sageli pärast seda, kui mootori seisund on juba muutunud, mis tundub aeglasem kui lähenemised, mis reguleerivad pöördemomenti otseselt. Seepärast loetakse SVPWM-iga täiustatud skalaarkontroll sageli täienduseks pigem kui sammuks kõrgsooritavale liikumisele.
SVPWM võib toota mõõdetavaid kasumeid, isegi kui muudatused ei muuda midagi muud, kuid suuremad täiustused ilmnevad tavaliselt alles pärast seadistuse aluste uuesti läbivaatamist, mille inimesed arusaadavalt kiirustavad käivitamisel.
Seaded, mis sageli otsustavad, kas SVPWM ilmub tootmises:
• Baassagedus
• Mootori nimeplaadi andmed
• Minimaalne sagedus
• Pinge/IR kompenseerimine
• Voolu piirangud.
Paljud kaebused, mida nimetatakse "madala kiirusstabiilsuse" probleemiks, on tingitud konservatiivsest voolu piirangust või vale mootori parameetrist, mitte PWM meetodist endast, mis võib olla alandav avastus tõrkeotsingul.
Generatsioon 3: Vektorkontroll
Mida FOC lisab: eraldi käepidemed pöördemomendi ja voolu jaoks
Vektorkontroll muudab mõõdetud faasivoole pöörleva viidena, nii et voolu tootvast voolust ja pöördemomenti tootvast voolust saab reguleerida sõltumatult, viisil, mis meenutab alalisvoolumootori juhtimist. Sel etapil muutub mootori juhtimine lihtsast reguleerimise käitumisest otseseks ja täpseks ajamijuhtimiseks. Tootlus on tugevam madala kiirus pöördemoment ja kiirema reageerimise, kuna pöördemoment muutub otse hallatavaks muutujaks, mitte libisemise kõrvaltoimeks.
Sensorivaba vs. suletud ahelaga vektorkontroll: erinevus, mida tunned masinal
• Sensoriteta vektorkontroll: hindab rotori asukohta/voogu, kasutades pinget, voolu ja mootori mudelit; vähendab juhtmete ja kulude vajadust; kasutatakse laialdaselt üldises tööstuses; kipub madalal kiirusel probleemidesse sattuma, kuna tagasivool on väike ja mudeli vead muutuvad ebaoluliseks.
• Suletud ahelaga vektorkontroll: kasutab enkooderit või resolvrit; tagab pideva nullkiirusetootmise ja korduva dünaamika; valitakse sageli tõstjate, veeremite, liftide ja täppisliikumise jaoks; võib muuta seadistamise vähem närviliseks, kui mehhaanika on pöördemomendi lainetuse suhtes tundlik.
Parameetri tundlikkus: tehing, millega elate pärast käivitamist
Vektori toimivus sõltub tugevalt mootori parameetritest ja voolu hindamisest. Mitmed mõjud võivad normaalse töö käigus vaikselt neid parameetreid nihutada ja seadme usaldusväärsus sõltub ainult selle mudelist.
Üldiselt esinevad drifti ja detsembrite allikad, mis tavaliselt ilmnevad tootmises.
• Rotori ajakonstandi drifitamine
• Temperatuurist tingitud staatori takistuse muutus
• Magnetilisus kõrgemate koormuste korral
• Pika mootori kaabli impedants ja EMI mõjud
Tavaline sümptomite muster ilmneb, kui süsteem töötab sujuvalt külmadel ja vähestel koormustel, kuid hiljem muutub vähem stabiilseks, valjemaks või ebaühtlaseks kõrgel temperatuuril või suure koormuse all. Need olukorrad viivad sageli kas vektorkontrolli usaldamatuse või rangemate häälestamis- ja parameetri tuvastamise praktikatega.
Häälestustavad, mis tavaliselt toovad kaasa rahulikuma paigaldamise
Stabiilsetel vektori paigalduseidel on sageli mõned harjumused, mis ei tundu glamuursetena, kuid takistavad hilisemaid pikki tõrkeotsingu seansse.
• Kinnitage mootori andmed reaalses juhtmestiku tingimustes: kaabli pikkus, väljundreaktorid, maandamine ja paigalduskujundus mõjutavad hindamist ja EMI-d viisil, mida katse seadistused harva tabavad.
• Kasutage lubatud pöörlevat automaatset häälestust: staatiline häälestus võib olla hea ventilaatorite ja pumpade jaoks, kuid suur pöördemoment madalal kiirusel võib sageli kasu saada pöörlevast identifitseerimisest.
• Kohandage juhtimisbändi mehhanikaga: liiga agressiivsed pöördemomendi ringkonnad võivad ärritada ühendusi, tagasilöökides ja resonantsides; veidi aeglasem, kuid hästi vaigistatud käitumine toob sageli parema läbilaskevõime ja vähem tüütuid katkestusi.
Praktiline reegel režiimi valimiseks ilma liialdamata
Kui protsess on tundlik madalal kiirusel pöördemomendi suhtes või ootab koormuse muutustest kiiret taastumist, vähendab vektorkontroll sageli ebameeldivate üllatuste arvu hiljem, kuigi seadistamise tööjõud tõuseb. Kui protsess talub kiiruselangust ja harva töötab null-kiirusel, toovad skalaarsed režiimid sageli stabiilsemaid igapäevaseid käitumisi, millel on vähem nuppude seadistamise riske.
Generatsioon 4: DTC (Otsene pöördemomendi kontroll)
Otsene pöördemomendi kontroll hindab staatori voogu ja pöördemomenti staatori viidraami sees ning valib muunduri lülitusriigid, et hoida voogu ja pöördemomenti histeesis ribade sees. Kuna see välistab mõned FOC rakendustega seotud pesa-ahelate struktuurid, suudab see pakkuda väga kiiret pöördemomendi vastust ja tugevat häiretagasikaanet. Rakendustes, kus operaatorid märkavad iga pöördemomendi langust tootmisdefekti või protsessi häirena, võib see reageerimisvõime olla rahulikum kui kaunilt sujuv lainekuju.
Tavalised eelised.
• Kiire pöördemomendi vastus äkiliste koormuse muutuste ajal
• Tugev madala kiiruseline pöördemoment, kui hindamine püsib usaldusväärsena
• Suhteliselt otsene struktuur, mis suudab käituda vastupidavalt kõrgematel võimsusastmetel.
Kulud ja piirangud, mis vajavad planeerimist.
• Pöördemomendi lainetus ja muutuva lülitusfrekveniga
• Hüsteesia käitumine võib tekitada kuuldavat müra ja pöördemomendi pulsi, mis välja paistab madala inertsiga või täppis süsteemides.
EMI ja termilise disaini keerukus: muutuva lülitamine muudab filtrite disaini keerukamaks ja võib halvendada mootori akustikat, kui seda ei hallata.
Sõltuvus hindamise kvaliteedist: peaaegu nullkiiruseline vaatleja nõrkus võib ilmneda, sarnaselt sensoriteta vektoriga, kuigi rakendused varieeruvad tarnija järgi.
DTC särab sageli siis, kui pöördemomendi transientide tähendus on suurem kui ülikõrge sujuv pöördemoment ja kus seadme/mootori paarimine on mõõdetud ja integreeritud nende ootuste kohaselt. Raskes tööstuses on atraktiivsus sageli vähem seotud tippandmetega ja rohkem seotud häirete taastumisega viisil, mis jääb stabiilseks ilma haprate häälestusteta.
Generatsioon 5: Maatriksi AC-AC muundamine
Maatriksmuundur muundab vahelduvvoolu sisendi otse vahelduvvoolu väljundiks ilma suure DC-seospaagi kondensaatorita. See muudab süsteemi iseloomu: see võib parandada sisendite võimsustegurit, vähendada mahukaid energia salvestamise komponente ja võimaldada sisuliselt kahe suunalist energia voogu. Samal ajal muudab see modulaarsuse piiranguid, kaitsemeetodeid ja ümberlülitamise nõudmisi, mis kipuvad suurendama koordineerimise koormust juhtimise ja võimsushardware'i vahel.
Maatrixi konversioon nõuab hoolikalt ajastatud kommutatsiooni, et vältida sisendfaaside lühist või induktiivsete vooluteede katkestamist. Stabiilse sensorivaba käitumise ja tugeva madala pöördemomendi saavutamine kutsub tavaliselt üles kõrge täpsusega vaatlejate (flux, pöördemoment, mõnikord kiirus), kiire reaalaja arvutamise ja keeruka modulatsiooni poole, mis võib kombineerida PWM-i hüstereesitaolise otsustamisloogikaga. Kui see on hästi tehtud, võib pöördemomendi vastus ulatuda millisekundi suurusele käitumisele, kuid inseneritehnika mugavusmarginaal on sageli kitsam kui traditsiooniliste pingejõu aluses konverteri (VSI) ajamite puhul, mis võib panna meeskondi ettevaatlikuks, kui kasu selgelt ei kompenseeri lisatud keerukust.
• Pingedünaamilise jaotuse suunised: praktiline maksimaalne väljundpinge on piiratud võrreldes sisendiga, mis võib vähendada kõrge pöördemomendi marginaali, kui süsteem ei ole selle ümber projekteeritud.
• EMC ja filtreerimine: DC-linki eemaldamine viib filtreerimiskoormuse ümber ja võib muuta elektriliselt mürarikkas keskkonnas nõuetele vastavuse keerulisemaks.
• Töökindluse kaubandused: elektrokeemiliste kondensaatorite eemaldamine võib mõnedes tööprofiilides eluiga parandada, kuid konverter toob kaasa keerukamad lülitus- ja kaitsevajadused, mis muudavad, kus rikkeid võib esineda.
Maatrixi konvertereid õigustatakse tavaliselt siis, kui domineerivad kahemõõtmeline energiatootmine, kompaktsus või kondensaatori tööea mured, ja kui koht suudab toetada sellele järgnevat inseneri- ja hooldustasemete keerukust. Need on keerulisemad õigustada, kui prioriteedid kalduvad kiirele rakendusele, laiale teenindusteadlikkusele või suurtele parameetrilistele ebamugavustele ja "piisavalt head" mootori andmetele.
Need põlvkonnad järgivad järjepidevat mustrit: jõudlus paraneb, kui pöördemoment ja flux liiguvad tekkivast käitumisest selgelt reguleeritud muutujateks. Kauplemine on see, et iga järgmine samm tugineb rohkem mudelitele, aistingute kvaliteedile, käivitamisdisipliinile ja mehaanilisele ühilduvusele. Teoreetiliselt tugevam ajam võib siiski madala kvaliteediga mootori andmete, mehaanilise süsteemi lainetuse võimendamiste või operatiivsete aegade tõttu olema nõrk.
VFD omadused
VFD-de maine kujuneb mõõdetud käitumise kaudu, mitte brošüüride keeles. Debatti lahendab tavaliselt see, kui järjekindlalt ajam muudab mootori vastust käivitamise, kiirusmuutuste ja osakoormuse töö ajal. Need on hetked, mil pärandmeetodid tavaliselt kaovad energia, sujuvuse või seadmete elu hindamisel.
Igapäevases inseneritöös on tulemused kordumatud, kui elektriline jõudlus ja protsessi ootused käsitletakse kui ühte disainiketti (energiavarustuse piirangud, mootori termilised piirangud ja protsessi dünaamikad, mis on omavahel seotud), mitte kui kahte paralleelset kontrollnimekirja, mis kohtuvad alles käivitamisel.
Pehme käivitamine ja väiksem elektriline/mehaaniline stress
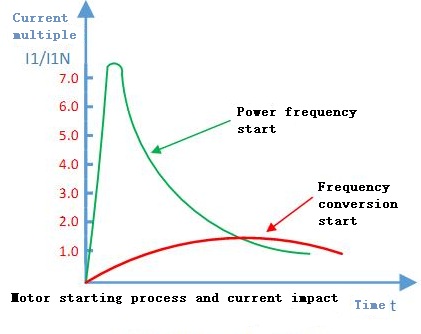
VFD määrav omadus on kontrollitud kiirus, mis rakendatakse pingete ja sageduste koordineerimise kaudu rampi ajal. Otsese ühenduse käivitamisel ulatub vool suurusjärku ~5–7× nimivoolust, ja miinused ilmnevad kiiresti.
Tüüpilised otsese ühenduse kõrvaltoimed:
• Pingelangus
• Mured tripid
• Kontaktori kulumine
• Sidumine/konveier/rikked.
VFD rampi korral jääb käivitusvool sageli ligilähedale ~1.2–1.5× nimivoolust, kuigi reaalsed numbrid sõltuvad siiski koormusprofiilist, kiirusest ja pöördemomentide nõudmistest. Kui see voolu spurt on vältitud, tunnevad inimesed tavaliselt seda enne, kui keegi matemaatikat teeb: vähem ehmatavaid pilke katkemise olekusse, vähem vahepealsete käivituste uuendamise ja rahulikum juhtimise kapoti esmaspäeva hommikustes käivitustes.
Ülemised seadmed saavad samuti kasu pehmest elektrilisest profiilist. Madalam sissevool vähendab tipukoormust transformeritele, generaatoritele ja jagatud toitmisseadmetele ning alandab tõenäosust, et teised tundlikud koormused samas bussis kogevad lühiajaliselt alapinget. Välitööd tehes on see üks neist muutustest, mis vaikselt vähendab frustratsiooni: "juhuslikud" tripid lõpetavad juhuslikkuse ja hooldust lõpetab vahelduvate sümptomite jahtimise, mis olid juurdunud raskustes alguses.
Kuna pöördemomenti saab hallata, kui kiirus tõuseb, saab ajam vältida järsku pöördemomendi spurt, mis otsese ühenduse käivitamisel sageli tekib. See ilmneb ennustatavama mehaanilise käitumisena, eriti masinatel, mis on juba õpetanud meeskonnale natuke alandlikkust.
Tavalised mehaanilised tulemused, kui pöördemomendi rippuvus on hästi kujundatud: pikem vöö eluiga; vähem sidumise ebaõnnestumisi; vähendatud torsioonilised kõikumised pöörlevates rongides.
Paljuski taimedes ei ole praktiline eristus mitte selles, kas koormus käivitub vaid üks kord, vaid selles, kas see käivitub iga kord samamoodi. Suure katkestusfriktsiooni, kleepuva toote või külmade laagritega koormused reageerivad sageli paremini, kui kiirus on kohandatud sihikindlalt, mitte lihtsalt oletades. Stabiilne ja etteennustatav käivitamine parandab usaldusväärsust normaalses töökorralduses.
Liialt agressiivne kiirusprofiil võib siiski tekitada vooluhulga tippe ja mehaanilisi šokke. Üksildane aeglane kiirusprofiil võib viia mootori ülekuumenemiseni madalal kiirusel, kui ventilaatori jahutus on nõrk või kui pöördemomendi nõudlus püsib kõrge.
Komisjonimise lähenemine, mis näib tavaliselt stabiilsem (ja mida on hiljem kergem kaitsta), on alustada konservatiivse kiirusprofiiliga ning lühendada seda vaid siis, kui protsess tõeliselt sellest kasu saab, jälgides vähest signaalide kogumit, mis harva valeandmeid annab:
Signaalid kiirusprofiili kohandamisel:
• Mootori väljundvool
• Mootori temperatuur (või termiline mudel)
• Vibratsiooni muutused
• Korduv käivitamise järjekindlus
Lai valik, sujuv kiiruskontroll sageduse varieerimise kaudu
Teine määrav omadus on kiiruskontroll ilma mehhaanilise ümberkujundamiseta. Selle asemel, et muuta poolte paare või lisada reduktoritasandeid, varieerib VFD toite sagedust. Induktsioonimootori puhul väljendatakse sünkroonspeedi ja rootori kiirus tavaliselt järgmiselt:
n₀ = 60f / P
n = 60f(1 − S) / P
Kus f on sagedus, P on poolte arv ja S on libisemine. Sageduse varieerimine võimaldab sujuvaid kiirusüleminekuid, hoides samal ajal libisemise vahemikus, mida kontroller suudab hallata. Praktikas tähendab see stabiilsemat protsessikäitumist: konveijerid saavad sünkroniseerida ülesvoolu/alla voolu kiirus, pumbad saavad pidevalt jälgida nõudlust ja ventilaatorid saavad hoida rõhu seadistusi ilma seiskamiseta, mis kulutab nii riistvara kui ka kannatlikkust.
Üks punkt, mis mõnikord jääb tähelepanuta, kuni jäätmed või ümbertegemine ei tee seda valusalt ilmseks, on see, et sujuv kiiruskontroll ei ole ainult mugavuse küsimus. Protsessi muutlikkuse vähenemine vähendab sageli operaatori sekkumisi ja see võib vähendada kvaliteedikadusid, mis kunagi ei kajastu energiamõõturis.
VFD kontroll tasub end kõige selgemini ära, kui protsess veedab reaalselt aega nominaalkiirusest eemal. Selle asemel, et töötada täiskiirusel ja pärast liigset voolu ära visata, võib süsteem töötada lähemale sellele, mida koormus antud hetkel tegelikult nõuab. See parandab üldiselt stabiilsust ja vähendab kulumist juhtselementidel, mis muidu veedavad oma elu masina vastu võitlemisel.
Komponendid, mis sageli näevad vähem kulumist, kui kiirus on kontrolli all:
• Voolureguleerimisventiilid
• Sissevõtu tõkked
• Ümberringi teed
• Mehaanilised pidurid, mida kasutatakse tempo säilitamiseks
Libisemine S ei ole pelgalt muutujaks võrrandis; see peegeldab, kuidas mootori arendab pöördemomenti koormuse all. Juhtimisseade haldab libisemist kaudselt, koordineerides pinget ja sagedust, et mootori saaks toota pöördemomenti, ilma et liigset voolu tõmmata.
Komisjonimisel aitab vaadata pöördemomendi nõudlust kogu kiirusulatuses, mitte ainult mugaval keskmise kiirusel. Seaded, mis keskmisel kiirusel tunduvad head, võivad madala kiirusel pöördemomendi tippude lähedal pettumust valmistada, ja see pettumus kipub ilmnema kõige vähem mugaval ajal, külmkäivitustel, raskete partiide puhul või pärast protsessi häiret.
Suur energiasäästupotentsiaal muutuva pöördemomendi koormustel
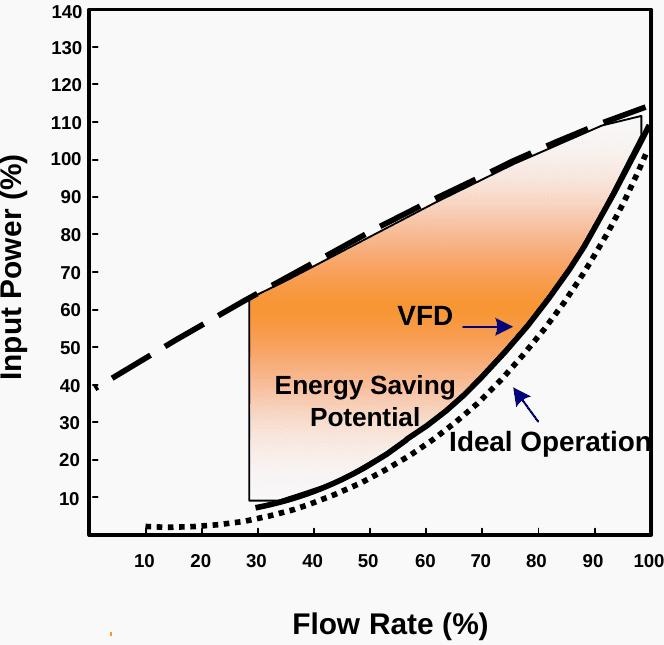
Energiakatkestus on sageli kõige tugevam muutuva pöördemomendi koormustel, nagu ventilaatorid ja tsentrifugaalpumbad. Affiniteedi seadused selgitavad kokkuhoiu kujundit:
Affiniteedi suhted:
• Voog ∝ Kiirus
• Rõhk/Kõrgus ∝ Kiirus²
• Võimsus ∝ Kiirus³
Kuna võimsus suureneb kiirusest kuubi võrra, võivad isegi mõõdukad kiiruslangused anda märkimisväärseid võimsuse vähenemisi. Seetõttu jälgivad voolureguleerimisventiilid ja sissevõtu tõkked sageli kiiruslangust, kui nõudlus varieerub: voolureguleerimine hajutab energiat rõhukao näol, samas kui kiiruskontroll vähendab seda energiat, mida süsteem peab algul genereerima.
Tööalade tingimustes on erinevus tavaliselt nähtav rohkem kui ühes kohas, mis on praktiliselt rahuldav, kuna see kinnitab, et juhtimisstrateegia teeb seda, mida mudel ennustas:
Üldised tööalased märgid madalama kiirusel nõudluse vähenemisest:
• Madalam kW tarbimine
• Vaiksem töötamine
• Vähem soojust süsteemis
• Vähem ventiili ja tõkke teeninduskõnesid
Professionaalsest seisukohast tulenevad säästud, mis püsivad ajaga, kipuvad tulema VFD käsitlemisest kui osa juhtimisstrateegiast (seadistused, piirangud ja tagasiside), mitte kui käsitsi kiirusnupp, mis kaldub harjumuse ja vahetuste eeliste kohaselt muutuma. Kui juhe on integreeritud selge loogikaga, rõhu, voolu või temperatuurikontrolliga koos kaitsetega, jäävad tulemused tavaliselt stabiilseks, isegi kui operaatorid muutuvad.
Paljud süsteemid töötavad suurema osa oma tööajast osaliselt koormusel. VFD kohandab mootori sisendvõimsuse tegeliku nõudlusega, mitte ei sunni täisspeediga töötamist ja „haldab” kadu. See vähendab sageli energiakasutust ja leevendab samal ajal mehaanilist koormust, kuna süsteem töötab vähem turbulentselt, vähem ahenduskadudega ja vähem kiirete juhtimisvõngete tõttu, mis ärritavad nii varustust kui ka operaatoreid.
Lihtne viis säästude valideerimiseks on võrrelda reaalset võimsust (kW) stabiliseeritud tööpunktides enne ja pärast kiirusjuhtimise rakendamist, mitte toetuda ainult nimiväärtuse oletustele. See mõõtmisharjumus aitab vältida ebamugavaid vestlusi hiljem, eriti kui süsteemi käigud, minimaalne voolupiirang ja juhtimisreguleerimine mõjutavad tulemust.
Välised tegurid, mis viivad tulemusi eemale õpikute hinnangutest:
• Süsteemi käigu kuju
• Minimaalne vool ja pea piirangud
• Anduri asukoht
• PID reguleerimine
• Ümbersuunamine või ringliiklus
VFD omadused
VFD määravad omadused saab kokku võtta kolme tulemusele suunatud teema alla, nagu inimesed väljendavad, kui nad otsustavad, kas paigaldus „töötas”:
(1) Pehmed algused madalama sissetuleku voolu ja vähem elektrilise/mehaanilise stressiga.
(2) Sujuv, laiaulatuslik kiirusjuhtimine sageduse varieerimise kaudu koos kontrollitud libiseva käitumisega.
(3) Tugev energiat juhtivus muutuva pöördemomendi koormuste puhul, kuna võimsus langeb kiiresti kiirus vähendamisel.
Kui neid teemasid rakendatakse praktilise häälestamise ja protsessi teadlikkuse juhtimisloogikaga, siis tulemused on sageli järjepidevad vahetuste ja aastaaegade jooksul, mis on sageli see, mida meeskonnad tegelikult tahavad: vähem üllatusi, vähem liini seiskumise sündmusi ja jõudlust, mis jääb stabiilseks pärast käivitamismeeskonna lahkumist.
Kokkuvõte
VFD jõudlus sõltub palju enamast kui vaid mootori kiiruse muutmisest. Stabiilne töö nõuab sageduse, pinge, voolu reguleerimist, mootori parameetreid, temperatuuritingimusi ja koormuse käitumise hoolikat koordineerimist. Erinevad juhtimisstrateegiad tasakaalustavad pöördemomendi reageerimist, efektiivsust, stabiilsust ja dünaamilist jõudlust rakenduse vajaduste järgi. Kuna tööstussüsteemid nõuavad kõrgemat efektiivsust, täpsust ja usaldusväärsust, areneb VFD tehnoloogia edasi läbi täiustatud juhtimismeetodite, kaitsesüsteemide ja võimsus-elektroonika disainide, mis toetavad kaasaegseid mootori juhitavaid rakendusi.
Korduma kippuvad küsimused [KKK]
1. Miks reguleerib VFD pinget koos sagedusega, mitte ainult muudab sagedust?
VFD reguleerib nii pinget kui sagedust, et hoida mootori magnetvoogu stabiilses töövahemikus. Kui sagedus langeb ilma korraliku pingereguleerimiseta, nõrgeneb voog ja pöördemomendi suutlikkus langeb järsult, eriti madalal kiirusel. Kui pinge jääb tööbeaduse sageduse jaoks liiga kõrgeks, võib mootori magnetiseerimisvool suureneda, suurendades soojust ja stressides isolatsioonisüsteemi. Pingete ja sageduse koordineerimine võimaldab seadmel hoida kasutatavat pöördemomenti, stabiilset voolu käitumist ja ettearvatavat termilist jõudlust muutuva koormuse tingimustes.
2. Miks paljude VFD problemidega, mis on jälgitud mootoreid, pärinevad tegelikult juhtseadmest?
Paljusid mootoreid süüdistatakse probleeme põhjustavad tegelikult selle tõttu, kuidas õiguste etapp suhtleb elektripuudega. Standardsed dioodid, muundurid tõmbavad mitte-sinusoidset voolu, mis toob kaasa harmonilised ja võib destabiliseerida nõrku elektrisüsteeme, millel on kõrgeallika takistus. Sümbolid, nagu tülikad tripsid, trafode kuumenemine, pingestabiilsus või katkendlikud vead, ilmuvad sageli õiguste ja saabuvate elektrisüsteemide vahelisest suhtest, mitte mootori enda probleemi tõttu. Sisendi komponendid, nagu juhtme reaktsioonid, DC-linki tõkestajad ja EMI filtrid, lisatakse sageli nende interaktsioonide stabiliseerimiseks.
3. Miks peetakse DC-linki kondensaatoreid üheks kõige stressitud komponendiks VFD sees?
DC-linki kondensaatoreid neelavad lainetavad voolud, stabiliseerivad bussipinge ja ajutiselt salvestavad energiat kiirete koormuse muutuste ajal. Aja jooksul pidev termiline stress ja lainetav vool mõjutavad järk-järgult kapatsitiivsuse toimivust. Juht võib jätkata töötab isegi siis, kui kapatsitiivsus halveneb, mis võib muuta probleemi alguses raskesti märgatavaks. Lõpuks muutub juht pingelanguste, regeneratiivsete sündmuste ja ülemineku koormuse muutuste suhtes tundlikumaks, põhjustades sageli seletamatuid tripsid või ebastabiilset käitumist, enne kui kondensaatori ebaõnnestumine toimub.
4. Miks suurendab PWM kanderiba sageduse tõstmine mootori akustikat, kuid suurendab ka termilist stressi sees roolis?
Kõrgem PWM kande sagedus toodab sujuvamat mootori voolu ja vähendab kuuldavat müra, nihutades lülitusharmoonikaid kõige vähem märgatavasse kuulmisvahemikku. Siiski, iga lülitusüritus genereerib kaotusi IGBT-des ja võimsuselektronikas. Kui lülitussagedus tõuseb, suurenevad inverteri kaotused ja sisemine kuumenemine märgatavalt. See loob praktilise inseneritehnilise kompromissi vaikse mootori töö ja VFD sees oleva vastuvõetava termilise marginaali säilitamise vahel. Paljude paigaldate puhul mõjutab kande sageduse häälestamine otseselt pikaajalist töökindlust ja kastide jahutamise nõudeid.
5. Miks käivitavad regeneratiivsed koormused tavalistelt kiirelt DC ülepingete vigu aeglustamise ajal?
Kui mootor aeglustub või töötatakse koormuse enda poolt, hakkab see käituma nagu generaator ja tagastab energiat DC bussi. Kui renoveeritud energia siseneb bussi kiiremini, kui seda saab dissipateerida või võrku tagastada, tõuseb DC pinge kiiresti ja aktiveerib ülepingekaitse. Seda käitumist mõjutavad tugevalt koormuse inerts ja aeglustuse agressiivsus. Paljud ülepingehädad lahendatakse aeglustuse rampide pikendamise või pidurisüsteemide ja regeneratiivsete komponentide õigesti suurendamise teel, et need vastaksid süsteemis salvestatud tegelikule mehaanilisele energiale.
6. Miks ületab vektorjuhtimine tavaliselt skalaari V/Hz juhtimist madalal kiirusel ja koormuse muutumisel?
Skalaarne V/Hz juhtimine reguleerib mootori käitumist kaudselt, säilitades ligikaudse pingest sageduse suhe, mis töötab hästi ettearvatavate koormuste, nagu ventilaatorite ja pumpade puhul. Vektorjuhtimine, eriti välikeskkonnaga kontroll (FOC), reguleerib otse pöördemomenti tootvaid ja vooluvälja tootvaid voolukomponente eraldi. See võimaldab juhil reageerida palju kiiremini koormuse muutustele ja säilitada tugevamat pöördemomenti isegi nullkiirusel. Erinevus muutub eriti märgatavaks rakendustes, mis hõlmavad kiiret kiirendust, suurt käivitamisjõudu või tundlikke pöörlemiskiiruse reguleerimise nõudeid.
7. Miks võivad vektoriga juhitavad ajamid pärast temperatuuri muutusi või mootori vahetust muutuda ebastabiilseks?
Vektorjuhtimine sõltub tugevalt täpsetest mootori parameetritest. Rotori takistus, staatori takistus, magnetilised küllastumisomadused ja kaabli impedants võivad kõik reaalsetes töötamisoludes muutuda. Temperatuuri muutused ja mootori asendused muudavad sageli neid parameetreid piisavalt, et vähendada hindamise täpsust, eriti madalal kiirusel, kus vaatlejate mudelid muutuvad tundlikumaks. Süsteemid, mis algselt töötavad sujuvalt, võivad hiljem arendada müra, ebastabiilset pöördemomendireaktsiooni või ebaühtlast kiirusreguleerimist, kui mootori mudel ei peegelda enam tegelikku elektrilist käitumist.
8. Miks peetakse autotuumastumist VFD seadistamise üheks kõige olulisemaks sammuks?
Autotuumastumine ühtlustab juhi juhtimis mudeli mootori tegelike elektriliste omadustega, mitte ainult nimesildi väärtustega. See parandab voolu reguleerimist, pöördemomendi reageerimist, libisemise hinnangut ja madala kiirusel käitumist. Paljude paigaldate puhul on autotuumastumine punkt, kus süsteem üleminekud lihtsalt töötamisest sujuvaks ja ettearvatavaks toimimisele. Pöörlevad autotuumastumise protseduurid on eriti väärtuslikud rakendustes, kus on vaja tugevad madala kiirusel pöördemomenti või täpset ülemineku reageerimist, kuna need püüavad mootori käitumist kinni reaalsetes töötingimustes.
9. Miks vähendavad VFD-d märkimisväärselt energia tarbimist pumpades ja ventilaatorites võrreldes throttle meetoditega?
Tsentrifugaalpumpade ja ventilaatorite puhul järgib võimsuse tarbimine afiniite seadusi, kus võimsus muutub ligikaudu kiirus kuubi arvu järgi. See tähendab, et isegi mõõdukad kiiruslangused võivad toota märkimisväärset energiasäästu. Traditsioonilised throtlemeetodid sunnivad mootori töötama täiskiirusel, samas kui voolu mehhaaniliselt piiratakse, mis raiskab energiat rõhukadumise tõttu. VFD vähendab seevastu mootori kiirust otse, nii et süsteem toodab ainult vajalikku voolu või survet, alandades võimsuse nõudlust allikast, mitte dissipateerides liigset energiat.
10. Miks suurendavad kiiresti lülitavad kaasaegsed VFD tehnoloogiad muresid EMI ja laagri voolude pärast?
Kaasaegsed PWM ajamid, eriti need, mis kasutavad SiC või GaN lülitusseadmeid, genereerivad äärmiselt kiireid pingetooted kõrge dV/dt. Need kiired servad võivad tekitada ühise režiimi pingeid, elektromagnetilisi häireid ja ekslikke telje voolusid, mis läbivad mootori laagreid. Kui maandamine, kaabli varjestus, filtreerimine ja sidumise praktikad on halvasti teostatud, võib tulemusena olla enneaegne laagri kulumine, müravad andurid, suhtluse ebastabiilsus või isolatsiooni pinge. Kõrge tulemuslikkusega paigaldate puhul muutuvad juhtmestiku ja maandamise kvaliteet sageli sama oluliseks kui juhtimisalgoritm ise.
Seotud ajaveeb
-
Mitu nulli miljonit, miljardit, triljonit?
![Mitu nulli miljonit, miljardit, triljonit?]()
2024/07/29
Miljon tähistab 106, hõlpsasti haaratav näitaja, võrreldes igapäevaste esemete või iga -aastaste palkadega. Miljard, samaväärne 10 -ga9, hakka... -
IRLZ44N MOSFET andmelehel, vooluring, samaväärne, pinout
![IRLZ44N MOSFET andmelehel, vooluring, samaväärne, pinout]()
2024/08/28
IRLZ44N on laialt kasutatav N-kanali võimsus MOSFET.Oma suurepäraste vahetusvõimaluste poolest tuntud see sobib väga paljude rakenduste jaoks, eri... -
Aku temperatuur on liiga madal, laadimine peatus.Kuidas seda parandada?
![Aku temperatuur on liiga madal, laadimine peatus.Kuidas seda parandada?]()
2024/10/6
Mobiiltelefoni aku laadimisprobleemid on tavalised, kuid neid saab tõhusalt hallata.Temperatuur mängib suurt rolli aku efektiivsuses, kuna nutitelef... -
BC547 transistori põhjalik juhend
![BC547 transistori põhjalik juhend]()
2024/07/4
BC547 transistorit kasutatakse tavaliselt erinevates elektroonilistes rakendustes, alates põhisignaali võimenditest kuni keerukate ostsillaatori voo... -
SCR põhjalik juhend (räni juhitav alald)
![SCR põhjalik juhend (räni juhitav alald)]()
2024/04/22
Räni kontrollitud alaldid (SCR) ehk türistorid mängivad oma jõudluse ja usaldusväärsuse tõttu elektrienergia tehnoloogias keskset rolli.Selles ... -
LR621, SR621SW, 364, AG1 aku ekvivalendid ja asendajad
![LR621, SR621SW, 364, AG1 aku ekvivalendid ja asendajad]()
2024/07/15
LR621 ja SR621SW nupud akud on levinud kompaktsetes elektroonikaseadmetes, nagu kellad, väikesed mänguasjad, kalkulaatorid ja kaugvõtmed.Mitu tootj... -
OP-AMP-vooluringide põhialused
![OP-AMP-vooluringide põhialused]()
2023/12/28
Elektroonika keerulises maailmas viib teekond oma saladustesse alati nii peen kui ka keeruka vooluringi komponentide kaleidoskoobi juurde.Selle valdko... -
Täielik juhend multiplekseritest ja nende roll digitaalsüsteemides
![Täielik juhend multiplekseritest ja nende roll digitaalsüsteemides]()
2025/09/20
Multiplekserid on komponendid digitaalsüsteemides, mis on loodud mitme sisendsignaali suunamiseks üheks väljundliiniks, kasutades binaarseid loogik... -
NMO -de ja PMOS -i erinevuste ja rakenduste võrdlemine
![NMO -de ja PMOS -i erinevuste ja rakenduste võrdlemine]()
2024/11/15
NMO -de ja PMOS -transistoride erinevuste mõistmine on oluline tõhusate vooluringide kavandamisel.NMOS (N-tüüpi metalli-oksiid-semonductor) ja PMO... -
CR2450 vs CR2032 Võrdlus: kõik, mida peate teadma
![CR2450 vs CR2032 Võrdlus: kõik, mida peate teadma]()
2025/09/15
Nupp -patareisid nagu CR2450 ja CR2032 toidavad palju igapäevaseid elektroonikaid, alates kelladest ja kaugjuhtimisest kuni meditsiiniliste ja töös...





Kuumad osad
- NL71024DFMH-266
- LM34919TL
- X9279TV14-2.7T1
- LTC1690IS8#PBF
- IDT72205LB15PF
- TMS471R1VF34A2FPZR
- BR24G02FVT
- VI-B53-CW/F2
- EPM240GT100C5N
- DSPB56362AG120
- MPQ7091
- FZT651TA
- LT3475EFE#TRPBF
- TC9349AFG-110
- 12065C154KAT4P
- LTC2858CMS-1#PBF
- BTA40-600B
- AEICC4277229MCY
- C3216X5R2E104M160AA
- 1MBI150SH-060
- 08051A2R7DAT2A
- 2SB1316
- C1608X6S1H154M080AB
- AP4953GM
- AM29LV320MB120EIT
- S29AL004D70BFI010E
- GRM0336T1E4R9CD01D
- TPSW107M010R0150
- OPA684ID
- ACS710KLATR-12CB-T
- PIC32MX795F512L-80I/PF
- PMB5724FV1.1
- ICS9P750CG
- SI5326B-C-GMR
- NCP6131NS52MNR2G
- XCS1OXL-VQ100AKP
- MAX6457UKD3B+T
- T491D107M006AT4839
- RFM-0505S
- T491B475K010AT7454
- AL-251A-T-0
- GWIXP425ABBT
- MT41K256M16RE-125:D
- ADC12L038
- PEF24471EV1.3G
- VP17042-3
- PNX0161ET101TM
- RVT1H101M1010
- VI-2N1-EW/F2
- MAX33040EAKA+T