- Eesti Vabariik
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC selgitus: funktsioonid, tüübid ja rakendused
Kataloog

PMIC uurimine
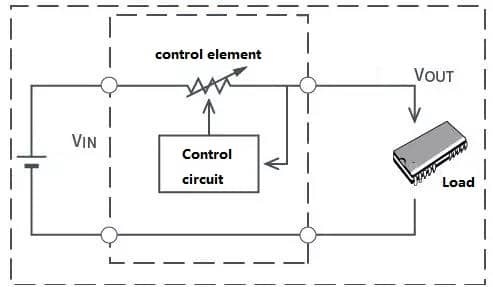
PMIC (Võimsuse Halduse Integreeritud Ring) on spetsialiseeritud IC, mis võtab vastu ühe või mitu võimsuse sisendit ja toodab mitmeid reguleeritud, kontrollitud võimuribasid erinevate koormuste jaoks plaadil. Need koormused sisaldavad sageli protsessoreid, mälusid, RF sektsioone, sensoreid ja mitmesuguseid perifeeria seadmeid.
Selle asemel, et hajutada diskreetseid regulaatoreid ja järelevalve IC-sid disaini kaudu, konsolideerib PMIC need ühte koordineeritud võimsuse halduri, mis toob paljudele meeskondadele ka teatud rahu, kui toitejõud käitub kummaliselt.
Protsessorid, mälu, RF plokid, sensorid ja muud koormused.
Funktsionaalne ulatus
Tõelistes toodetes ületab PMIC-i panus märgatavalt pingetootmise. Praktikas ilmneb kasu, kui see käitub nagu süsteemi tasandi võimsuse koordinator, mis seob kokku mitmeid vastutusi, mis loomulikult omavahel suheldes buutimise, töötamise koormusastmete ja veaprobleemide ajal.
Konversioon
PMIC suudab kombineerida erinevat tüüpi regulaatoreid, et efektiivsust rõhutavad võimsuse ribad ja müra tundlikud võimsuse ribad saaksid optimeeritud eraldi. Praktikas on peamine mure sageli mitte vajalikku pinget genereerida, vaid hoida stabiilset pinget koormuse muutumisel, käivitamise sündmustel ja muudel nõudlikel töötingimustel.
Buck regulaatorid, boost regulaatorid, buck-boost regulaatorid ja LDO regulaatorid.
Riba, mis tundub puhas pideva koormuse all, võib reaalses profiilis märgatavalt stressi all olla. Efektiivsus, lainetamine, ülemineku vastus ja termiline varu on sageli tähelepanelikult uuritud, kui CPU puhangud, RF edastusimpulsid või sensorite proovide tipud testitakse reaalses töötingimustes.
CPU puhangud, RF edastusimpulsid ja sensori proovide tipud.
Jaotus
Pärast ribade genereerimist määrab PMIC sageli, kuidas neid jagatakse, vahetatakse ja isoleeritakse. Just siinkohal võib disain tunda end kas robustsena või haprana, eriti kuum-ühenduse, brownouti ja kaabelteemade korral. Kui jaotust käsitletakse läbimõeldult, kontrollitakse sissetulekut, piiratakse tagasivoolu teid ja vigade korral ei ole vähem tõenäoline, et need põhjustavad plaadi laialdast kokkuvarisemist.
Riba sisselülitamine, koormuse lülitid, vooluringi piiramise ja ideaal-dioodi ORing mitme allika sisendite jaoks.
Tuvastamine ja järelevalve
Enamik PMIC-e integreerib järelevalve funktsioonid, mis jälgivad pidevalt riba tervist ja pakuvad signaale, mida tarkvara ja riistvara saavad tõlgendada. Laboris lõpetavad need omadused kiiresti tundmise, kui toredad lisadega, ja hakkavad tunduma nagu erinevus puhtas tõrkeotsingusessioonis ja päevades, mis on veetnud jahiga reset'i, mis keeldub nõudmisel taastumast.
Alalepingute monitorid, ülepingete monitorid, ülekoormuse tuvastamine, termilised andurid ja toitehead signaalid.
Üks õppetund, mis jääb alati meelde kogenud toote arendamise meeskondadele, on see, et toitehead läved ja katkestuse ajastamine peavad olema ühemõttelised. Kui need on ebaselged või kehvasti kooskõlas süsteemiga, on tulemuseks sageli vale taastamised või vaimsete käivitumise ebaõnnestumised, mis ilmnevad ainult temperatuurikandurite, teatud akude või kiire taaskäivituse jada pärast.
Kontroll ja järjekorrastamine
PMIC sisaldab sageli mehhanisme, mis kujundavad, kuidas rullid tõusevad, langevad ja koordineeruvad üksteisega. Need detailid näitavad end konkreetsete tulemustena: kas süsteem käivitub järjekindlalt, kas komponente koormatakse ülearu ja kas laud naaseb pärast vigade tekkimist tuntud olekusse.
Järjekorrastamine, pehme käivitamine, järsaku kujundamine, tühjendusrajad ja konfigureeritav rullide vahelise ajastamine.
Digitaalsüsteem ei nõua tavaliselt mitte ainult õigeid stabiilse oleku pinget; see eeldab ka, et need rullid jõuavad teatud järjekorras ja piiratud ajavahemike jooksul. Kui kalde nurkad on liiga järsud, liiga aeglased või lihtsalt vale järjekorras, võivad sisemised struktuurid ja valdkonnad sattuda määramata tingimustesse, mis on äärmiselt katkestatud, eriti SRAMi hoidmisaktiivsuse ja kiire liidese tõstmisel.
Sisediani ESD struktuurid, SRAMi hoidmisvaldkonnad ja kiirusliidesed.
Mis kujundab tulemusi reaalsetes disainides
Kui meeskond liigub blokkskeemist töötava prototüübi juurde, sõltub PMIC valik ja konfigureerimine sageli operatiivsetest detailidest, mitte turunduslikest spetsifikatsioonidest. Peened probleemid on need, mis tekitavad ajakava survet, kuna need ilmuvad hilja ja harva esinevad nad ühes, ilmse juurpõhjusena.
Kiirete üleminekute ja dünaamiliste koormustega toimetulek
Kaasaegsed protsessorid ja RF sektsioonid võivad nõuda suuri vooluastmeid mikrosekundi ajaskaaladel. PMIC võib paberil tunduda täiesti vastuvõetav ja ikkagi näidata langust, ülekäiku või kõlavust, kui juhtimisring, kompenseerimismeetod, väljundvõrk ja PCB parasiidid sunnivad reaalses paigutuses omavahel suhtlema.
Langus, ülekäik ja kõlavus.
Meeskonnad, kes testivad üleminekureaktsiooni varakult, teevad seda sageli, kuna nad on kogenud hilja avastamise valu. Varane valideerimine võib vähendada ebameeldivate ümberdisainimise tsüklite tõenäosust, mis hõlmavad induktoreid, väljundkondensaatoreid, kompensatsioonikomponente või isegi PMICi enda valikut.
Induktorid, kondensaatorid, kompensatsioonikomponendid ja PMIC ise.
Järjekorrastamine kui süsteemi leping, mitte mugavus
Toitejärjekorrastamine töötab kõige paremini, kui seda käsitletakse lepinguna silikoni nõuete, püsivara eelduste ja lauakäitumise vahel. Kui tõusukiirus ja toitehea ajastused kalduvad välja sellest, mida protsessori andmeleht ootab või mida püsivara iseenesest eeldab, kalduvad ilmuma katkestatud käivitamisprobleemid.
Protsessori andmelehe nõuded ja püsivara ootused.
Mis teeb need probleemid eriti ärritavaks, on nende tendents kaduda sõbralikes katsekeskkondades ja naasta temperatuurikõikumiste, aku kuumplugimise või marginaalse toite tingimuste ajal. Nendes keskkondades vähendavad deterministlik järjestus ja ettearvatav lähtestamise käitumine üllatusi ja lühendavad tõrkeotsingutsükleid.
Temperatuurikandjad, aku kuumplugimise sündmused ja madala toite sarnased tingimused.
Kaitsekäitumine tööaja ja teenusekulu järjestajana
Ülevoolulimiidid, termiline välja lülitamine ja UV/OV kaitsed arutatakse sageli ohutuse keeles, kuid kasutusele võetud tooted kogevad neid kättesaadavuse funktsioonidena. PMIC, mis piirab voolu sujuvalt, teatab vigadest piisava selgusega, et neid saaks rakendada, ja taastub kontrollitud viisil, võib takistada väikse perifeerse tõrke muutumist täis süsteemi seiskumise ja toetustooteks.
Kaitsemehhanismid: ülevoolukaitse, termiline väljalülitamine, alapingekaitse ja ülepinge kaitse.
Süsteemi usaldusväärsuse eelised: Sujuv voolu piiramine, vigade aruandlus ja kontrollitud taastumine.
On sageli täpsem ja ausalt öeldes kasulikum disainikaalutlustes mõelda PMIC-ist kui osa süsteemi usaldusväärsuse arhitektuurist, mitte lihtsalt toite konverteerijana. Disainid, mis vananevad hästi, kalduvad valima PMIC-i selle põhjal, kui järjekindlalt see rakendab ettearvatavaid toiteolekuid normaaloperaatoril, tõrke käsitlemisel ja üleminekul.
Kui seda vaatenurka tõsiselt võetakse, hakkavad detailid, mida on lihtne alahinnata varajase planeerimise käigus, nägema teistsugust tähendust integreerimise käigus. Rullide tühjenemise käitumine, toitehead signaali terviklikkus ja veatelemtrija muutuvad omadusteks, mis eristavad seadet, mis lihtsalt käivitub laboris, seadmest, mis käivitub puhtalt, järjekindlalt ja ettearvatavalt välitingimustes, ilma et insenerimeeskond peaks õnnele lootma.
PMIC kategooriad
PMIC-id on sageli märgitud peamise funktsiooni kaudu, kuid riistvara transportimisel kipuvad nad käituma nagu kompaktne, koordineeritud toitealajaotus süsteem, mitte üheotstarbeline komponent. Praktikas võib PMIC-tüüpe sorteerida, vaadates (a) mida nad reguleerivad, (b) mida nad piiravad või täidavad, ja (c) mida nad ühendavad, lahutavad või aktiivselt juhivad. Süsteemi ülesehituse vaatenurgast on jagav joon, mis pidevalt esile kerkib, vähem lineaarne versus lülitamine ja rohkem see, kas PMIC on loodud haldama raja-to-rada interaktsiooni koormuse muutumisel. Kui seda interaktsiooni käsitletakse hoolikalt, tunnevad plaadid stressitestide ajal rahulikumalt; kui seda ei tehta, võib sama disain tunduda toitepingel hea ja muutuda temperamentseks täielikult kokku pandud tootes.
Peamised funktsionaalsed rühmitused
Need plokid genereerivad radasid, seadistavad tööpunktid ja neelavad sisenditingimuste muutusi. Nad katab tavaliselt kõik, alates madala voolutugevusega vaiksetest radadest kuni kõrge voolutugevusega digitaalsete domeenideni.
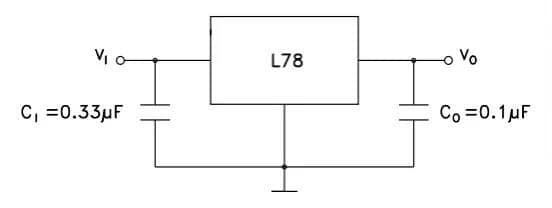
• Lineaarne reguleerimine (LDO-d)
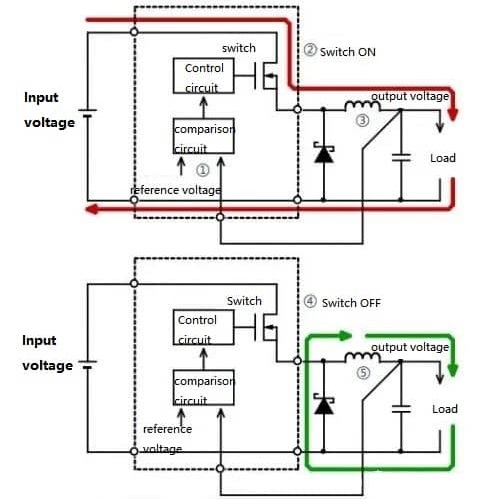
• Lülitusreguleerimine (buck, boost, buck-boost, pöördumine, laadimispumbad)
• Eesmine konversioon ja eelreguleerimine (AC/DC adapterid, USB-PD vastuvõtjal stage'id, autode eelregulaatorid mõnede platvormide jaoks)
Need plokid kujundavad, kuidas energia tohib käituda, määrates künnised, jälgides piire ja reageerides riketele. Nad ei pruugi tarnida vatte, kuid nad sageli otsustavad, kas süsteem kukub puhtalt või kummaliselt.
• Pingereferentsid ja bandgapisid
• Juhendajad, monitorid ja akna võrdlejad
• Taaste loomine, valvuri ajastid ja alajõu tuvastamine
• Järjekorrastamine, jälgimine ja vea reageerimine (UV/OV, ülekoormus, temperatuuriline reageerimine)
Need plokid määravad, kuhu energia voolab, millal see on isoleeritud ja kuidas välist koormust juhitakse. Reaalsetes disainides on nad koht, kus äärmuslikud juhtumid, kuumplugimine, kaabli kadumine ja tarvikute tõrked kipuvad esimesena ilmnema.
• Toite-path juhtimine
• Koormuslülitid ja eFused
• Aku laadimine
• Ekraaniga seotud radad ja juhtijad
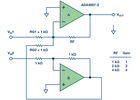
• MOSFET-i väravajuhid
Regulatsiooni/konversiooni tüübid
LDO-d valitakse sageli, kui soovitakse madalat väljundmüra, lihtsat disainivoogu ja kiiret väikesignaalkäitumist. Nad ilmuvad sageli RF-plokkides, heli radades, täpsetes sensorites ja ADC viitega seotud toites, kus lainetused võivad muutuda mõõdetavaks jõudluse kadumiseks.
Soojus on sageli piirev tegur regulaatori jõudluses. Kui sisendi ja väljundi pingevahe suureneb või koormusvool tõuseb, võib võimsuse hajumine ja temperatuur muutuda elektriliste täpsuse spetsifikatsioonidest olulisemaks.
Toite rada, mis mobiiltelefonide avatud toitepingel testimise ajal tundub stabiilne, võib arendada olulisi kuumenemisprobleeme suletud süsteemides või kõrge temperatuuriga keskkondades, kus õhuvool ja temperatuurilised marginaalid on vähenenud.
Buck konverterid töötavad efektiivsete põhiraudade: rakenduse protsessorite, DSP-de, DDR radade ja teiste kõrge voolutugevusega digitaalsete domeenide korral. Praktikas võivad kaks plaati, mis kasutavad sama buck-ilt, käituda väga erinevalt, sõltuvalt juhtimisrežiimist, töörežiimidest väikese koormuse korral ja paigutusest tingitud parasitidest.
• Juhtimisviis (pingerežiim, voolurežiim, histeretiline, konstantne tööaeg)
• Kerge koormuse käitumine (PFM, impulsi vaheline vahele jätmine, sunditud PWM)
• Ajutine reageering võrreldes väljundlainetuste vahetustega
• EMI positsioon (laiali hajumine, lülitusfrekventsi valikud, paigutuse tundlikkus)
Üks detail, mis kipub teravdama disaini ülevaateid, on koormusprofiili reaalsus. Konverter, mis tundub suurepärasena 2 A juures, võib veeta enamikku oma elust 20–200 mA, kus režiimisiirded, värava laadimise kadu ja lülitamise kulud domineerivad. Ainult tipp-efektiivsuse väärtuste võrdlemine võib viia sellele, et akuteema tegelikus kasutuses halveneb rohkem, kui esialgsed hinnangud eeldasid.
Boost konverterid rakendatakse tavaliselt siis, kui sihtrada peab ületama allika, tavalised näited hõlmavad 5 V genereerimist üheelemendilisest akust, ekraani pingestamise radade loomist või LED-stringide toitmist. Buck-boost topoloogiad on soositud, kui sisend võib ületada soovitud väljundi, näiteks stabiilse süsteemiraja säilitamine kogu aku tühjenemise kõveras.
Need konverterid lahendavad sageli süsteemitasandi peavalusid, nagu näiteks 5 V domeeni stabiilseks hoidmine aku languse ajal, kuid see leevendus tuleb koos rohkemate liikuvate osadega: kompensatsiooni keerukus, lüliti voolupiiri käitumine ja edastatud EMI, mis võib olla üllatavalt tundlik plaadi geomeetriale ja kaabli tingimustele.
Telefonide ja väikeste IoT-moodulite puhul on AC/DC tellis sageli toote välispinnal, kuid eesmine läbirääkimine ja sisendikaitse jõuavad üha enam seadme sisse. Isegi kui andmeleht turustab neid USB omadustena, mitte PMIC omadustena, mõjutavad nad tugevalt allavoolu konverteri suurust, soojuse jaotust ja halvimat juhtumipõhist stressi.
• USB-PD tuvastamine ja läbirääkimise tugi
• Sisendi voolu piiramine ja sissehakkamise juhtimine
• Ülepinge kaitse USB lisaseadmete ja adapterite jaoks
Täpsus toele
Viidatud ankrute täpsus ADC-de, DAC-de ja komparaatrite läviväärtuste jaoks. Segasignaali toodetes korduvad detailid, mis on olulised, on triivikäitumine, müraisend ja PSRR asjakohases sagedusvahemikus. See võib tunduda vastupidine, kuid väike kogus viidatud müra võib ilmuda mõõdetava jitterina, anduri veana või läviväärtuse ebatäpsusena, kui see korrutatakse reaalses maailmas saavutatud kasumi ja filtreerimise valikutega.
Juhid jälgivad rööpaid alampiiride, ülepinge ja järjestamise rikkumiste suhtes. Mitme rööpaga süsteemides aitavad nad vältida pool-elavaid olekuid, kus üks domeen tõuseb ja hakkab töötama, samas kui teine domeen on hiljaks jäänud, madal või osaline.
Usaldusväärsuse seisukohalt kalduvad robustne jälgimine vähendama selliseid vahepealseid valdkonna tagastusi, mis kõik kedagi frustravad: probleemid, mis ilmnevad ainult külmade käivituste, madala aku käivitamiste, kiire kuuma pistiku ürituste või piiripealsete kaablitega, mis polnud kunagi labori "õnnelikus teel".
Järjestamine on rohkem kui rööp A siis rööp B. See muutub aruteluks ajakava tolerantside, tõusukallede, lähtestamise suhete ja selle üle, mida süsteem teeb, kui rööp jääb oma aknasse hiljaks.
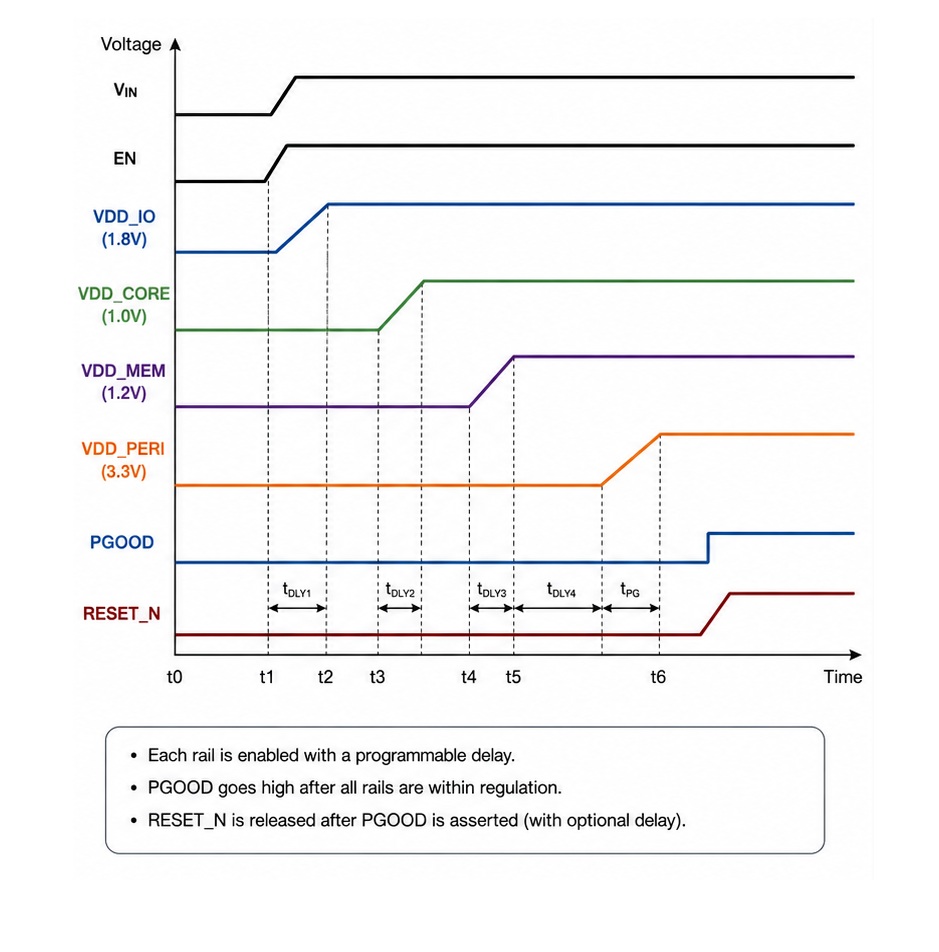
SoC dokumentatsioon määratleb sageli IO-enne-kerne sõltuvused, mälutreeningu piirangud ja täpsed lähtestamise mittetäitmise ajad. PMIC-d, millel on programmeeritav järjestamine ja kontrollitud tõusud, võivad vähendada väliseid liimiloogikaid ja muuta käivitamise vähem arvamiseks, eriti kui plaadid kiirelt evolutsioneeruvad ja väikesed ajamuudatused võivad säästa päevade kaupa tõrkeotsingut.
Toite- ja ajami funktsioonid
Toite-tee loogika otsustab, kas süsteem töötab USB, aku või mõlema segu pealt, ja see mõjutab, mis juhtub üleminekute ajal.
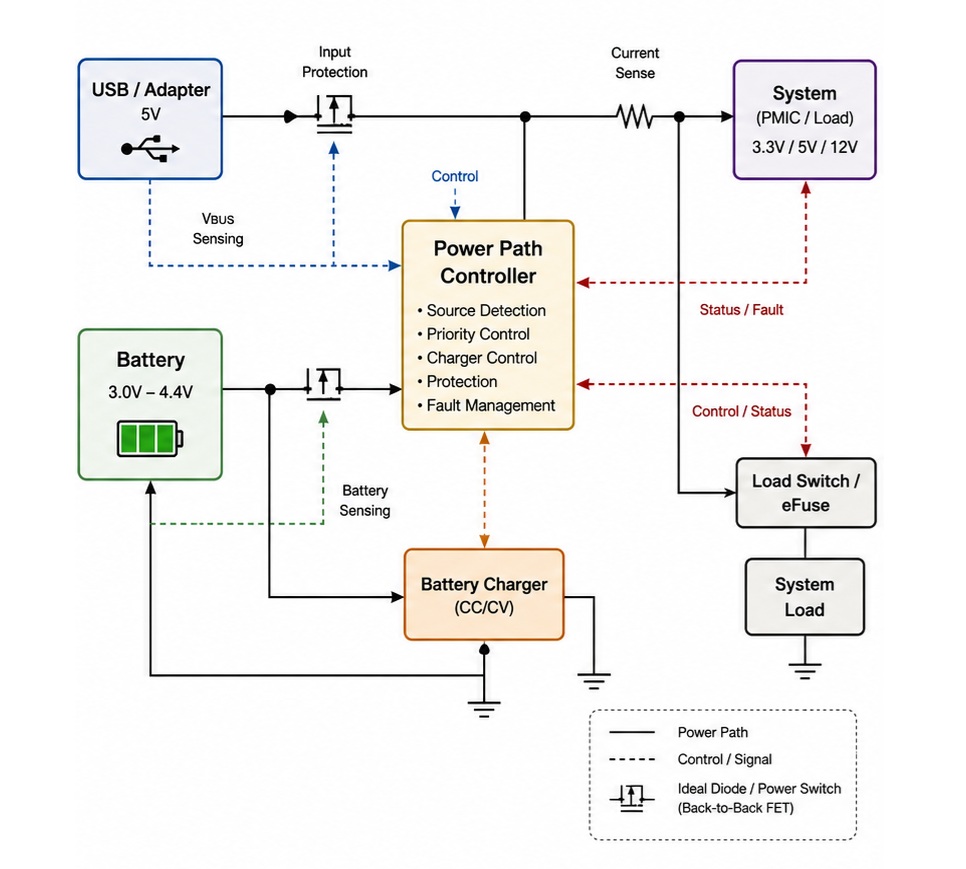
• Sujuv ülemineku käitumine (piirates tilgutusi, mis käivitavad lähtestusi)
• Sisendi voolu piiramine, et sobida USB/adapterite ja vastavuse piirangutega
• Ideaalse dioodi käitumine, et vähendada tagasivoolu
Korduv reaalmaailma lõks on alahinnata takistust kaablites, ühendustes ja kaitseelementides. Kiire transiidi ajal võib PMIC käituda täpselt nagu on ette nähtud ja süsteem võib siiski madalaks jääda, kuna ülemine tee on madalam kui mudel eeldas. Need rikkumised tunduvad "ebausaldusväärsed", kuni kogu tee impedantsi mõõdetakse ja seda koheldakse osa disainist, mitte jala noodina.
Laadijad erinevad aku keemia toe, ringkontuuri topoloogia, termiliste omaduste ja disaini eesmärkide poolest. Ühisprioriteedid hõlmavad kiiremat laadimist, madalamat pinna temperatuuri, vähendatud EMI-d või süsteemi jõudluse säilitamist laadimise ajal ilma aeglustumise või ebamugava kuumenemiseta.
• Lineaarsed laadijad
• Lülitamislaadijad
• Toitepanga/OTG režiimid
Valik sõltub sageli termilisest eelarvest, regulatiivsetest või ühilduvuspiirangutest ja sellest, kas seadmelt oodatakse täisjõudluse säilitamist laadimise ajal, ilma et see tunduks aeglane või töötaks ebamugavalt soe.
Koormuslülitid on tavalised rööbaste väravakäivitamiseks ooteenergia vähendamiseks ja domeenide eraldamiseks rikete või saatmisolekute ajal. eFusud lisavad programmeeritavad voolu piirangud, rikke ajad ja kontrollitud sisselülitus käitumine.
Paljude toodete puhul tasuvad need plokid oma plaadi ala, muutes segased rikkumisrežiimid, ühenduse lühised, lisaseadmete vead, vale ühendamise sündmused sisaldatud intsidentideks, mitte kaskaadseteks lähtestamisteks või füüsiliseks kahjustuseks, mille diagnoosimine on kallis ja veelgi raskem korduda.
Kuvamissüsteemid nõuavad tihti mitmeid toite röösid, nagu AVDD, VGH ja VGL, hoolikalt kontrollitud käivitamisjärjestusega, et vältida nähtavaid kuvamisjuhiseid. LED juhtimisseadmestik peab samuti reguleerima voolu täpselt ja reageerima usaldusväärselt avatud stringi ja lühise rikkumistele, kuna need tingimused esinevad sageli töö ajal.
Väravajuhtide ja kõrgema võimsuse etapid muutuvad üha olulisemaks robootikas, autotööstuses ja tööstuslikes seadmetes, kus mootori juhtimine ja kõrgema pingega konversioonid ristuvad PMIC-stiilis koordineerimise, telemeetria ja kaitsepoliitikaga.
Tüüpiline "Telefon/IoT PMIC"
Paljudes telefonides ja kompaktsetes IoT moodulites mõistetakse PMIC paremini kui sihipärane plokkide segu, mitte ühtse kategooriana. Integreerimine on tavaliselt suunatud PCB pinna vähendamisele, järjestuse lihtsustamisele ja andmete paiknemisele ühes kohas, et jälgida ja mõjutada voolukäitumist.
• Mitmed kõrge efektiivsusega buck-konverteerijad CPU, GPU, mälule ja alati aktiivsetele rööbastele
• Üks või mitu LDO-d madalmüra analoog- ja RF rööbaste jaoks
• Laadija ja toite tee vooluring USB ja akude koordineerimiseks
• Jälgijad, järjestajad, termilised kontrollid ja katkestuste aruandlus telemeetria ja rike käitlemiseks
Raudtee interaktsioon domineerib sageli tulemuste üle. Buck transient võib ühenduda RF LDO-ga jagatud maapinna impedantsi kaudu. Laadija termiline tagasitõmme võib vaikides vähendada saadaval olevat süsteemi voolu, ja see muutus võib tuua tuuma raudi langusesse töökoormuse tipul. Dokumendid, mis hindavad iga ploki isoleeritult, näevad esialgsetes bench-testides puhtad välja, kuid muutuvad seejärel nõudlikuks integreeritud stressitestimisel, kui kõik lülitavad, kuumutavad ja läbiräägivad samaaegselt.
Valik ja integreerimine
Lülitusregulaatorid valitakse tavaliselt dissipatsiooni vähendamiseks, kuid need võivad tutvustada lainekujulist ja EMI-d, mis levivad tundlikesse valdkondadesse. LDO-d rahustavad sageli müra, kuid hind ilmneb soojuse näol, kui pingetoiused on küllaldased või vool ei ole tähtsusetu.
• Lülitusregulaatorid: kõrgem efektiivsus, rohkem lainekujuliste/EMI haldamise tööd
• LDO-d: madalam müra, kõrgem soojuse hajumine pinget alandamisel
Kompromiss, mis sageli hästi toimib, on buck'i kasutamine vahe-raudi loomiseks, seejärel LDO kasutamine lõpliku tundliku raudi jaoks, nii kaua kui kõrgendused ja termiline käitumine on plaanitud teadlikult, mitte jäetud teiste otsuste järel.
Kiired koormuse muutused nõuavad kiireid juhtimisringlusi, õiget kompensatsiooni disaini ja piisavat väljundkapasitanti, et säilitada stabiilne reguleerimine esimestel mikrosekunditel vastuse ajal. Kappasiitori valik hõlmab rohkemat kui lihtsalt kapasitandi suurendamine. Tõhus kapasitants võib väheneda DC-biasi, temperatuuri muutuste ja vananemise tõttu. ESR ja ESL mõjutavad samuti ringkonna stabiilsust, üleminekureaktsiooni ja EMI toimivust, muutes need olulisteks disainiteguriteks.
Meeskonnad, kes valideerivad täpsete kapasitormate dielektriku, pingetootmise ja korpuse suurusega, mis on ette nähtud tootmiseks, kipuvad vältima hilise etapi stabiilsuse üllatusi, eriti kui tarneahelad sunnivad ekvivalente asendusi, mis on ainult paberil ekvivalentsed.
PMIC-i käitumist rikkumise korral saab projekteerida erinevate filosoofiate ümber. Üks lähenemisviis püüab saavutada sujuvat halvenemist, alajõudude käsitlemist, protsessorile läheb edasi pidurdamise vihjeid, valikulise raudi väljalülituse, et süsteem jääks kasutatavaks vähendatud režiimis. Teine lähenemisviis sunnib määratletud väljalülitamist, et kiiresti jõuda teadaolevasse ohutusse olekusse.
• Sujuv halvenemine: sageli kooskõlas kasutajakogemuse eesmärkidega tarbekaupades
• Määratletud väljalülitamine: sageli kooskõlas ennustatava käitumisega ohutusele orienteeritud disainis
Parim PMIC on tavaliselt see, mille järjestamine ja rikkumise vastused vastavad toote kavandatud käitumisele, mitte see, mis juhtub reklaamima kõige pikemat kontrollnimekirja.
Kõrgemad lülitusfrekventsid ja laiebändiga toiteetapid suurendavad saavutatud võimsustiheduse, kuid nad toovad kaasa ka rangema PCB paigutusnõuded ja suurema EMI tundlikkuse. Samal ajal muutuvad tarkvarafunktsioonid, nagu telemeetriad, katkestused, logimisfunktsioonid ja programmeeritavad juhtimispoliitikad, oluliseks teguriks kogu energiasüsteemi haldamises ja integreerimises.
PMIC-id, mis säilitavad ennustatava energia käitumise reaalses töökoormuses, võivad oluliselt vähendada tõrkeotsingu aega, eriti süsteemides, mis haldavad raadioid, protsessoreid, laadimisoperatsioone ja termilisi piire samaaegselt.
PMIC Rakendusala
PMIC-id ilmuvad igal pool, kus elektrienergiat tuleb konverteerida, jaotada, järjestada, jälgida ja kaitsta, hoides samal ajal kaotus ja häired kontrolli all. Neid kasutatakse rutiinselt tarbija-, ettevõtte-, autotööstuse ja tööstusdisainides, kuid jagav joon pole tavaliselt lõpp-turg, vaid see, milline näeb välja toitepuu praktikas. Hetkel, kui toode sisaldab mitmeid raude, millel on erinev müra taluvus, erinev sammkoormuse käitumine ja erinevad vigaootused, lõpetab PMIC tundmine "osavaliku" ja hakkab käituma nagu kujundav jõud süsteemi käitumises. Paljudes reaalses disainis, kui kõrgtehnoloogiline protsessor on paaritatud raadiode, andurite, mälu ja kiirete I/O-ülesannetega, muutub toitearhitektuur selleks, mida platvorm suudab järjepidevalt pakkuda, isegi kui arvutus ja tarkvara näevad paberil tugevalt välja.
Kuidas PMIC Käitumine Muudab Reaalmaailma Süsteemi Tulemusi
Koormuse ülemineku vastus, mis vaikselt seab lae
Kaasaegsed CPU-d ja GPU-d tõmbavad järske voolu astmeid tugevdamise ja puhangute aktiivsuse ajal ning need astmed võivad olla üllatavalt halastamatud. Kui PMIC-i juhtimisringlus, väljundkapasitants ja jaotuse impedants ei suuda hoida raudkitsastes piirides, reageerivad tarkvarameeskonnad sageli viisil, mis on peen, kuid kulukas: nad lühendavad tugevdusaken, lõikavad tippe kella või lisavad laiemad kaitsepiirded, et kokkuvarisemised ei ilmuks välja. Inseneritehnika seisukohalt võib see kaubandus olla frustreeriv, kuna platvorm võib tunduda efektiivne, samas kui see jätab reaalsetes liikides tulemuslikkuse, mis jääb maha.
Meeskonnad, kes valideerivad ainult staatiliste koormustega või korras laborimustritega, õpivad seda tavaliselt hilja. Reaalsed töökoormused loovad liigeste servi: lühikesed mängimise puhangud, AI järelevalve tipud ja raadiosageduse ühisosa sündmused võivad toota pinge langusi, mida ei esinenud, kui raud oli harjutatud healoomulise pink profiiliga. Ebamugav õppetund on see, et korduv transiidi käitumine räpaste töökoormuste all ostab sageli rohkem kasutatavat jõudlust kui harmooniliste efektiivsuste numbrite tagaajajate tegemine ühel tööpunkti juures.
Rippel ja lairiba müra, mis muutuvad signaalide puhtuse võlaks
Ripple'it ei peaks käsitlema ainult analoogsete jõudlusparameetritena. Lülitusharmoonikud ja lairiba müra võivad mõjutada ADC lahutusvõimet, suurendada RF faasimüra ja vähendada SERDES signaali marginaali, eriti kui toiteraud jagab naasemeid või seotud pakendite ja PCB induktiivsuse kaudu. Toiteraud, mis näib ühes nurgas testimisel puhas, võib kõrge kiirusliideste, antennide või tihedate mälu osade lähedal käituda väga erinevalt.
Paigutuse reaalsused muudavad lugu samuti. Mehaanilised piirangud ja väljajätmise alad sunnivad kompromisse, ja need kompromissid võivad võimendada paarimise teid, mis olid ideaalsetes paigutustes nähtamatud. Praktikas teenib toite lahendus usaldusväärsust, kui see jääb stabiilseks ja rahulikuks ebaperfektse paigutuse ja mitte-ideaalsete marsruutide all, mitte ainult siis, kui see on mõõdetud parima juhtumi demonstreerimisseadistuses.
Käivitamine ja järjestamine, mis kujundavad usaldusväärsuse tulemusi
Toite tõusu järjekord ja tõusu käitumine otsustavad, kas mälu koolitus lõpetatakse järjekindlalt, raadiosageduste kalibreerimine toimub ilma kummaliste nurga ebaõnne ja alati aktiivsed domeenid jäävad stabiilseks madalate pingete ajal. Marginaalne järjekord viib sageli selliste rikete mustrite tekkimiseni, mis nõuavad aega ja moraali: „üks viiskümmend sisselülitamist,” raskesti korduv ja veelgi raskem debugimisprotsess, kui süsteem on täielikult integreeritud.
Järjestamine töötab tavaliselt paremini, kui seda käsitletakse osana nullimise ja taastumise käitumisest, mitte hilise kontrollnimekirjana. Tooted, mis jäävad tootmise ajal tugevaks, käsitlevad üldiselt kogu toite tõusmise/toite langemise teed kui korduva oleku masinat, ja tõestavad seda halbade tõusu kiirussete, külmade temperatuuride ja madala aku tingimustes. Automaatne toite tsükli teenimine on sageli koht, kus usaldusväärsust teenitakse, kuna see paljastab vahelduvad servad, mida mõned käsitsi toite lülitused kunagi ei näita.
Valiku kriteeriumid kui süsteemi kaubandustuba
Tõhususe hindamine erinevates režiimides, mitte trofee numbrina
Tõhusus muutub tähendust sõltuvalt sellest, kuidas toode tegelikult oma aega veedab. Tippkoormuse efektiivsus võib spetsifikatsioonides muljetavaldav välja näha, kuid tegelik aku tööaeg ja termiline jõudlus sõltuvad paljusid töötingimusi, sealhulgas puhangutöötlus, normaalsed koormused, kerged koormused ja sügava une töötlus. Lülituskaod, juhtimiskaod ja rahuoleku vool võistlevad igas regioonis erinevalt ja “võitja” muutub töökoormuse profiiliga.
Aku toitega disainide puhul ilmnevad madal Iq ja tugev kergkoormuse efektiivsus sageli otse pikema aja jooksul laadimiste vahel, millest tootemeeskonnad hoolivad väga konkreetse viisina. Serverite ja võrgu seadmete puhul valitsevad juhituskaod ja termilised piirangud tavaliselt, kuna pidev vool ja soojuse eemaldamine muutuvad igapäevaseks reaalsuseks. Lihtne viis otsustada on kaardistada efektiivsuse sihid töökoormuste ajajaotusele, mitte optimeerida operatiivpunkti, mida peaaegu kunagi ei esine välitingimustes.
Termiline varu, mis hoiab tulemuslikkuse kokkuvarisemast kuumuse all
Termilised piirangud määravad sageli maksimaalse jätkusuutliku voolu, mis omakorda määrab maksimaalse jätkuva arvutuse. PMIC võib elektriliselt suurepärane välja näha ja siiski ebaõnnestuda süsteemi eesmärkides, kui selle pakett, vask ja paigutus loovad kohalikke kuumakohti mälu, kaitsekanistrite või temperatuuritundlike RF plokkide lähedal. Tegelikus kokkupanekus võivad väikesed temperatuuri tõusud põhjustada alandamise käitumist, kaitse piire või pikaajalisi usaldusväärsusprobleeme, mida keegi ei taha pärast käivitamist selgitada.
Hästi vananevad disainid planeerivad sageli termilisi varusid. See planeering ilmneb sageli kui pakendi termilised omadused, mis vastavad koormusele, mitme faasi võime, kui vooluprofiil seda õigustab, ja paigaldusstrateegia, mis levitab soojust, hoides samal ajal vooluringid piisavalt lühid. et vältida termiliste lahenduste muutumist müra probleemideks.
EMI piirangud, mis paisutavad ajakavad ja iteratsiooni kulusid
Lülitusfrekvents, serva määrad ja juhtimise topoloogia mõjutavad tugevalt, kas EMI-d saab hallata lihtsa filtreerimisega või muutub see plaadi keerutamise ja hiliste laboriseansside tsükliks. Andmelehe vastavus on vaid osa loost; paigutuse tundlikkus võib tulemusi domineerida. Lahendus, mis nõuab peaaegu täiuslikku silmuse geomeetriat, võib muutuda loteriiks, kui mehaanilised piirangud sunnivad ebamugavatele paigutustele.
Paljud meeskonnad eelistavad lõpuks veidi aeglasemat, enam kontrollitavat lahendust, millel on hallatavad üleminekud ja etteennustatav spektraalne käitumine, sest see vähendab tõrkeotsinguaega ja alandab sertifitseerimise riski. See valik võib tunduda konservatiivne, kuid see kohtub sageli reaalsusega, et EMI probleemid kipuvad ilmuma hilja, kui ajakava on kõige vähem andestav.
Kaitsefunktsioonid, mis määravad riketootmise ja teeninduskäitumise
Kaitsekäitumine mõjutab tugevalt süsteemi reaktsiooni rikeolukordades. OCP, OVP, OTP ja lühise kaitse seadistused võivad määrata, kas süsteem viib läbi puhta sulgemise, siseneb lukustamisrežiimi või taaskäivitub korduvalt ebastabiilse käitumisega. Need vastused mõjutavad otseselt tõrkeotsingu raskust, tugivajadusi ja üldist toote usaldusväärsuse tajumist.
Kaitse seadistused interakteeruvad ka normaalse tööprotsessiga. Agresseivne voolu piiramine võib vähendada kahjustuste riski, kuid see võib ka käivitada korduvad lähtestamised vooluhulgaga koormatud hetkedel või käivitamise tippsituatsioonides. Rikkete käsitlemine töötab tavaliselt kõige paremini, kui see on häälestatud osana ette nähtud teenindusstrateegiast, otsustades, mis peaks uuesti proovima, mis peaks lukustama, mis peaks logima ja mis peaks kiiresti ebaõnnestuma, mitte jääma vaikimisi registri väärtusteks.
Integratsioonikulu, mis hõlmab püsivara, valideerimist ja tõrkeotsingu reaalsust
Integratsioonikulu ei piirdu harva BOM-i ja PCB piirkonnaga. See hõlmab püsivara tööd, valideerimise ulatust, testimise aega, tootmisrobustsust ja tõrkeotsingu koormust, kui midagi ei käitu ootuspäraselt. Kõrge integreeritusega PMIC-id võivad vähendada komponentide arvu, mis on ahvatlev, kuid nad koondavad ka riski: hiline kohandamine ühel raamil võib käivitada suurema osa toitepuu uuesti kvalifitseerimise, kui meeskond oli planeerinud.
Ameerika Ühendriikide lähenemisviisid võivad suurendada paigutuse vaeva ja osade haldamist, kuid need võivad pakkuda ka moodularite ja lihtsamat asendamist, kui tarneahelate tingimused muutuvad või keskkonna uuendusi oodatakse. Ausam valikufilter on programmi riskitaluvus: ajakava tundlikkus, oodatav iteratsioonide arv ja kui sageli tõenäoliselt kujundust pärast esimest väljaandmist muudetakse.
Digi-toite funktsioonid: paindlikkus, mis toob kaasa sunnitud tingimused
Telemetria, programmeeritavad raudteed ja dünaamiline pingereguleerimine võivad tuua reaalseid eeliseid: tihedam toiteoptimeerimine, selgemad rikete diagnostika ja kohanduv jõudluse skaleerimine, mis jälgib töökoormust ja temperatuuri. Samal ajal toovad need funktsioonid endaga kaasa püsivara sõltuvused, konfiguratsioonikontrolli, tootmisprogrammide distsipliini ja täiesti uusi rikeviise, mis ei eksisteeri lihtsamatel analoogkonfiguratsioonidel. Telemetria muutub väärtuslikuks ainult siis, kui kogutud andmeid kasutatakse aktiivselt jälgimiseks ja kujundusotsusteks, mitte ei jää kasutamata diagnostiliste töölaudade sisse.
Praktikas teenib digitaalne toit oma kohta, kui see sulgeb mõõdetava ringi. Kui programmeeritavust saab kasutada saagi taastamiseks, aku elu pikendamiseks või termilise madaldamise vältimiseks kontrollitud poliitikaga, muutub see tugevaks hoidjaks. Kui see on lubatud lihtsalt seetõttu, et see on saadaval, muutub see sageli kasutamata konfiguratsiooni pinnaks, mis komplikeerib valideerimist, tõstab tootmisvigu ja loob ebamugavusi selle osas, millised seadistused on tõeliselt kavandatud.
Praktiline valik ja valideerimise voog, mis jälgib süsteemi käitumist
Töövoog, mis tavaliselt peab surve all vastu, alustab süsteemi käitumise eesmärkidest, mitte PMIC katalogi skannimisest ja lootmast, et sobivus töötab hiljem. See jagab probleemi konkreetseteks, testitavateks tükkideks ja sunnib selgust selles, mida hea käitumine tähendab enne plaadi üles tõstmist.
• Muuda töökoormuse tõusud raudtee nõudmisteks (lubatud allakäik, seadmise aeg, tipvool, kordamise kiirus).
• Määrake müra eelarved tundlikele plokkidele (ADC, PLL, SERDES, RF) ja kaardistage need lainete piirangute ja paigutus eeldustega.
• Määrake järjestus, lähtestamise sõltuvused ja tumedate olukordade taastumine ühes oleku masinas.
• Hinnake EMI riski varakult, kasutades realistlikke paigutuse piiranguid ja kavandatud varjestus lähenemist.
• Valideerige kaitse käitumist rikkete süstimisega, mis sarnaneb reaalse lühiühtluse, kaabeltükkide ja aku vaibumistega.
ADC / PLL / SERDES / RF
Selline lähenemine vähendab hiliseid üllatusi, kuna see kohtleb PMIC-d mehhanismina, mis reguleerib toitekäitumist süsteemi tasemel, mitte lihtsalt taustteenusena. Kui toite kujundatakse esmaklassilise alamsüsteemina, muutub jõudlus järjepidevamaks, usaldusväärsust on lihtsam kaitsta andmete toel ja vastavus paraneb ennustatavamaks, samas kui meeskond kulutab vähem aega vahelduvate rikete tagaajamiseks, mis algavad raudteelt, mitte loogikalt või tarkvaralt.
Tulevased suunad PMIC-idele
Suurem võimsustihedus ja madalamad tuumpinged jätavad PMIC-id reguleerima kitsama elektroonilise marginaaliga ja väiksema taluvusega viivituste suhtes. Kuna toitepinged asuvad lähemal digitaalse koormuse minimaalsetele tööpunktidele, võib isegi mõõdukas langus ilmneda pehmete vigadena, taaskäivitustena või sooritusvõime vähendamisena, mis tundub süsteemi töölepanemise ajal "müsteeriumina". See suunab järk-järgult kujunduse tähelepanu eemale raadi täpsuse jälgimisest püsiolukorras ning mõtlema sellele, kuidas see käitub kõige halvemates, kiiresti muutuvas koormusolukordades.
Meeskonnad puutuvad sageli kokku ebamugava tõega: ring, mis näeb välja rahulik laboris, võib tootes siiski käituda vale järgi, kui reaalne koormus loob teravaid koormusastmeid, lokaliseeritud kuumakohti ja ebaühtlast faasivoolu jagamist. Tugevam mustrimudel on käsitleda ringi disaini, jõuastmete valikuid ja PDN takistust kui ühte seotud süsteemi ning seejärel kinnitada käitumine, kasutades esinduslikke töökoormuse signatuure, mitte puhtaid, ideaalitud impulsse.
Kiirem transiidid suunavad loomulikult disainid kitsamate ringide suunas, kuid kitsamad ringid muudavad disainid ka rohkem vastuvõtlikuks parasitaarinduktsiooni, taluvuse kogunemiste ja tajumismüra suhtes, mida on kergesti alahinnatud varakult. Paljudes programmides tuleneb stabiilsuse ja väljundstabiilsuse vahe paremast väikese signaali modelleerimisest, usaldusväärsest voolu tajumisest ja kompensatsioonist, mis on häälestatud reaalse paigutuse teadlikkusega.
Lülitusfrekvendi tõstmine võib aidata, kuid see ei tõlgi automaatselt parema transiidi käitumise juurde, kui tajumistee ja PCB geomeetria ei suuda toetada lisanduvat ribalaiust. Kui see sobimatus ilmneb, kulutatakse ringi võimenduse müra suurendamiseks, mis võib avalduda jõhkrana lülitamisena, kuuldamatena artefaktidena teatud töörežiimides või EMI haripunktidena, mis ilmnevad alles pärast mehaanilist integreerimist.
Kaasaegsed arvutus- ja ühendusplokid genereerivad nõudlust, mis on purskkaevu ja kompositsiooniline, seega transiidivalideerimine peegeldab üha enam seda, mida tarkvara ja raadiod tegelikult teevad, mitte seda, mida koormuskast suudab hinnata ühe sammu abil.
Paljud meeskonnad jõuavad töövoo juurde, mis ühendab:
• Labori koormuse astmed
• Platvormi telemetry logid
• Iteratiivsed ajakohastamised kompensatsiooni ja dekupplingu valikutes.
See lähenemine kipub vähendama hilisemaid üllatusi, eriti kui termilised piirangud muudavad aeglaselt elektrilist käitumist ja nihutavad marginaale aja jooksul.
Surve vähendada suurust, samal ajal kui sooritust parendatakse, ulatub integreerimisele pakendisse ja ümbritsevasse struktuuri, mitte ainult kiipi. Täiustatud pakendamine ja integreeritud passiivsed elemendid võivad lühendada kõrge di/dt ringe, vähendada parasitaarseid ja pingutada transiidi vastust viisidel, mis tunduvad kohe mõõdetavad veaotsingu ajal. Integreeritud magnetid võivad veelgi tõsta võimsustihedust, kuid kasu on sageli piiratud termiliste radade, mehaaniliste piirangute ja selle suhtes, kuidas sidumine muutub, kui disain on oma reaalses kestes.
Rakendatud toodetes, saadud kasumid integreerimisest sageli tulenevad ehituse variatsioonile vähendamisest ja sooritusvõime stabiliseerimisest tootmisvõnke ulatuses, mitte lihtsalt materjalide arve kärpimisega.
Pakendi valik peegeldab üha enam elektrilisi ja termilisi tulemusi, sealhulgas madalamat ringi induktiivsust, paremat soojuse hajumist ja prognoositavamat takistuse kontrolli. Ühine praktika on see, et kaks sama skeemiga plaati võivad käitumises järsult erineda, kui üks disain säilitab kompaktsed vooluringid ja teine hajutab voolutee üle PCB.
Süsteemi integreerimise suurenedes on paigutuse kavandamine sageli varakult arenduses prioriseeritud, kuna hilisemad komponentide muutused ei suuda alati korrigeerida probleeme, mis on põhjustatud halvast geomeetriast või PCB marsruutimisest.
Integreeritud magnetid võivad tõsta efektiivsust kõrgematel sagedustel ja vähendada kõrgust, mis on atraktiivne tihedalt pakendatud toodetel. Samal ajal võivad nad sisse tuua uusi sidumisradade tekitamiseks ja luua termilisi kuumakohti, mida on keeruline tuvastada hiliste prototüüpide jooksul. Sujuvalt käivad disainid käsitlevad tavaliselt induktorit ja pakendit kui kombineeritud EMI- ja termilisi koostööpunkte, sealhulgas paigutuse otsuseid antennide, kõrge kiiruslinkide ja tundlike sensorite läheduses.
EMI praktika kalduvus on eemale liikuda puhtalt staatilistest leevendustest ja liikuda kontrollstrateegiate poole, mis ennustavad töötingimusi. Tehnoloogiad nagu laiapindses modulaatsioon, nutikam lüliti juhtimine ja rikkalikud sisesed tajumised võivad vähendada haripunkte, kuid nad nõuavad ka koordineerimist, et vältida lihtsalt haripunktide eralduse kaubanduse kõrgesagedusliku müra või raadio häiretega.
Paljud meeskonnad on näinud, et järjestus mängib välja: varased EMI kontrollid läbivad, seejärel hiljem ehitused ebaõnnestuvad, kui mitu regulaatorit lülituvad korrelatsioonimustreid, kui uus utiliidiskedul muudab töökoormuse ajastust või kui kaablid ja varjundid nihutavad tagasiteed. Need kogemused suunavad EMI mõtlemist ülespoole platvormi tasemele, selle asemel, et käsitleda iga regulaatorit eraldiseisva kastina.
Kuna lülituse servad muutuvad kiiremaks, mõjutab dv/dt kontroll üha enam nii heitkoguseid kui ka pikaajalist stressi. Lüliti draiverid lisavad rohkem programmeeritavust ja kaitselogika muutub kontekstitundlikumaks, mis võib häälestamise muuta rohkem süsteemitehnika sarnaseks kui komponentide valikuks.
Praktikas on ajasäästlik harjumus häälestada servade kiirus Mehaanilisse lõplikku konfiguratsiooni tehtud mõõtmiste abil, kuna varjestus, kaablid ja maapinnastruktuurid muudavad sageli EMI tulemusi viisil, mida paljas plaadifail ei näita.
Parandatud sissejuhatus kiibis võimaldab adaptiivseid käitumisi, näiteks lülituste käitumise muutmist, kui heitkogused lähenevad piirile või kui töörežiim muutub. Aja jooksul nihkub see PMIC-id eemal fikseeritud funktsioonide käitumisest ja suunab neid hallatud subsüsteemide poole, mis pidevalt lepivad kokku jõudluses, müra ja termilistes tingimustes tagasiside, mitte oletuste põhjal.
Akutoitega süsteemid jätkavad ultra-madalate talvevoogude ja tugeva kerge koormuse efektiivsuse tagaajamist selliste tehnikate abil nagu PFM/burst töö, dioodi simulatsioon ja automaatne režiimi valik. Emotsionaalne pingetunne, mida paljud meeskonnad tunnevad, on see, et samad kerge koormuse režiimid, mis näevad tehnilises andmelehes suurepärased välja, võivad tutvustada rippumist, kuuldavaid artefakte või juhuslikke EMI allkiri, mis ilmnevad kohe, isegi kui keskmine efektiivsus näeb suurepärane välja.
Ambiguudi vähendamiseks defineerivad meeskonnad üha enam, mida tähendavad vastuvõetav ooterežiimi käitumine konkreetsetes tingimustes, seejärel valivad režiimi strateegia sobitamiseksk.
Tavalised spetsifitseeritud sihid hõlmavad:
• Rippumise piirangud unenäos/ootele
• Äratamise latentsus
• Akustilised/müra piirangud
• EMI käitumine perioodilise hooldusaktiivsuse ajal.
Praktikas räägib aku eluiga realistlike töötsüklite jooksul sageli loo usaldusväärsemalt kui tipp efektiivsuse numbrid, eriti kui töötsükkel sisaldab und, perioodilist ärkamist, raadiopurskeid ja sensori proovivõttu.
Automaatne režiimi vahetamine on ahvatlev, kuid üleminekud võivad tekitada lühikesi häireid, mis kaovad keskmistest mõõtmistest ja ilmnevad ainult harva esinevate lähtestamisena või juhuslike müra kaebustena. Disainid, mis tunduvad "kindlad" välitingimustes, kipuvad kulutama täiendavat valideerimise pingutust just piiri vahel PFM-i ja PWM-i, sealhulgas äratamisjärjestuse, järjestuse viivitus ja piiritingimuste koormaste sammu vahel.
Korduv mustrin on, et kõige agressiivsem efektiivsuse seade ei ole alati toote valik, kui see toodab rippumist, mis varieerub tingimustele või müra sidumine, mida on raske ümber kuvada. Paljud meeskonnad lõpevad konfiguratsiooni valimisega, mis loob väikesest efektiivsuse osast käitumise, mis on korduv erinevates temperatuurides, ehitusmuutustes ja stsenaariumides, mis sageli vähendab integreerimisriski ja toetuse muuturika.
Kui arvutusplatvormid suurenevad, toetuvad nad üha enam täpsetele telemeetriale, adaptiivsele pingega skaleerimisele ja kaitsele, mis on koordineeritud paljude raudteede vahel. Telemeetria mängib praktilist rolli igapäevainseneri töös: see võib lühendada alustamise aega, kiirendada juureprügistusanalüüsi ja vähendada ahvatlust "liigselt projekteerida", paljastades, kus tegelik margin asub.
Telemeetria on tavaliselt kõige tähtsam, kui tingimused muutuvad kiiresti, mitte kui raudtee on stabiilne ja kergelt mõõdetav. Tulevased PMIC-d tõenäoliselt parandavad proovide käitumist, filtreerimise valikuid ja ajasünkroniseerimist, et tarkvaralised otsused jälgiksid reaalsust rohkem.
Üks nüanss, mida kogenud meeskonnad kipuvad hindama, on see, et rohkem proove ei tähenda automaatselt rohkem kasu; järjepidevus, kalibreerimise stabiilsus temperatuuri üle ja selged määratlused ribalaiuse ja latentsuse osas otsustavad sageli, kas andmetele saab usaldusväärselt reageerida.
Enamate raudteede olemasolu toob kaasa suurema vajaduse koordineeritud kaitse käitumise järele, nii et süsteem reageerib ühtselt, mitte raudteed pidi.
Kaitse koordineerimine katab sageli:
• OCP reageerimiskäitumine
• OVP reageerimiskäitumine
• UVP reageerimiskäitumine
• OTP reageerimiskäitumine
• Järjestuse sõltuvused
• Vea taastamise poliitikad
• Staatus jagamine PMIC-de vahel
Reaalsed süsteemid ebaõnnestuvad sageli mitte seetõttu, et funktsioon on puudulik, vaid kuna raudteed reageerivad erinevalt samale sündmusele, tekitades madalate voogude kaskaade või restartitsükleid, mida on raske diagnoosida. Koordineeritud vea käsitlemise lähenemine, jagatud staatus pluss ühtne taastumisplaan, sobib paremini sellele, kuidas platvormid peaksid stressi all käituma.
GaN ja SiC vastuvõtt kasvab valdkondades, kus lülitussagedus ja tõhusus muudavad oluliselt suurust või jõudluspiire. Kiirem lülitamine võib vähendada magnetkomponente ja teravdada ajutist vastust, kuid see tõstab ka dv/dt-ga seotud stressi, EMI tundlikkust ja nõudmisi õigeaegse juhi disainile ning isolatsioonistrateegiale. Piirangud ei ole puhtalt elektrilised; need hõlmavad ka tootmise varieerumise ja reaalmaailma vale kasutusstsenaariume, mida meeskonnad on õppinud tõsiselt võtma.
GaN ja SiC lahendused kipuvad välja maksma täpset väravajuhtimise kontrolli, distsiplineeritud paigutust ja kaitsemeetodeid, mis takistavad ületmist, "ringing'" ja soovimatut sisse lülitamist. Praktiline teadmine, mis korduvalt esile kerkib, on see, et paigutuse kvaliteet võib domineerida seadme valikul; hästi teostatud paigutus "modest" seadmega võib ületada premium seadme, mis on paigutatud müra tekitavasse induktiivringi.
Lülituskiirus tõusmisel muutuvad isolatsioonivalikud ja pikaajalise usaldusväärsuse piirid disainivaatlustes ja kvalifitseerimise planeerimises järjest olulisemaks. Vastuvõtt kiireneb tavaliselt seal, kus jõudlusest saadud kasu õigustab selgelt lisatud disaini rangust, samas kui kulutundlikud või müratundlikud tooted liikuvad sageli ettevaatlikumalt ja nõuavad selget tõendit süsteemitase kasu kohta.
PMIC-d kujundatakse üha enam nii, et nad toimivad nagu poliitika täitjad, kes vahendavad tõhusust, müra, temperatuuri ja usaldusväärsust reaalajas. Arhitektuurid, mis kipuvad hästi vananema, käsitlevad energiat hallatava ressursina: PMIC telemeetriateave teavitab tarkvara poliitikat ja tarkvara poliitika omakorda kohandab PMIC töörežiime ja positiivset käitumist. See hägustab piiri riist- ja tarkvarahalduse vahel viisil, mis võib alguses tunduda ebamugav, kuid sageli tasub see end ära, vähendades marginaalide kuhjumist ja parandades vastupidavust reaalses töökoormuses.
Kokkuvõte
Tõhus ringkaitse sõltub rohkemast kui lihtsalt ühe kaitseosa lisamisest. Usaldusväärsed disainid nõuavad korralikku koordineerimist ülepingetõrje, pingepiirangute, voolu piirangute, maapinna, paigutuse ja riketimingute vahel. Igal kaitse seadmel on oma tugevused ja piirid, seega peab valik vastama oodatud rikke tüübile, energiatasemele, reageerimiskiirus ja töötingimustele. Hästi planeeritud kaitsestrateegia suurendab ohutust, vähendab rikke riski ja toetab pikaajalist usaldusväärsust reaalses elektroonilistes süsteemides.
Korduma kippuvad küsimused (KKK)
1. Miks peetakse PMIC-d süsteemi tasemel võimsuse koordineerijaks, mitte lihtsalt pingeregulaatoriks?
PMIC teeb kaugel rohkem kui lihtsalt ühe pinge teisendamine teiseks. See haldab, kuidas mitu riba genereeritakse, järjestatakse, jälgitakse, jaotatakse ja kaitstakse kogu süsteemi ulatuses. Praktilistes disainides koordineerib PMIC protsessoriribade, mälutoite, RF-sektsioonide, sensorite ja perifeersete domeenide töötlust, samuti tegeleb käivitamise ajastuse, riketega taastumise, termiliste nähtustega ja toitega seotud signaalidega. Kuna kõik need käitumised omavahel suhtlevad käivitamise ja tööaja jooksul, muutub PMIC sageli üheks peamisteks teguriteks, mis kujundavad süsteemi usaldusväärsust ja stabiilsust.
2. Miks ilmnevad PMIC-ga seotud rikete tavaliselt ainult reaalsetes töökoormustes, mitte lihtsalt labori testimisel?
Kalibreeritud katsetamine staatiliste koormustega harva korratakse kiiret ajutist käitumist, mida põhjustavad moodsad protsessorid, RF-ülekannamehhanismid, mäluliiklus ja sensorite plahvatused. Realistlikes töötingimustes kogevad ribad ootamatuid vooluhüppeid, mis paljastavad nõrkusi ajutises reaktsioonis, PCB parasiitides, kompensatsiooni häälestamisel ja väljundvõrgu stabiilsuses. PMIC võib kontrollitud testimise ajal tunduda stabiilne, kuid hiljem näidata langust, ületamist, "ringing'" või järjestamise vigu, kui reaalsed töökoormused tekitavad kiiresti muutuvat elektrinõudlust.
3. Miks käsitletakse toite järjestamist süsteemi taseme leppena, mitte lihtsalt käivitamisfunktsioonina?
Paljud digitaalsete süsteemide nõuavad spetsiifilisi ajastus suhteid tuumiribade, mälu ribade, I/O toite, reset signaalide ja alati aktiivsete domeenide vahel. Kui ribad tõusevad vale järjestuse või vale ajastusega, võivad protsessorid, SRAM-i säilitusplokid ja kiirete liideste operatiivsed olekud muutuda määratlemata. Need probleemid põhjustavad sageli vahelduvaid käivitamisrikked, mis ilmnevad ainult temperatuuride ekstreemsuste, pingetõusude või akulaadimistingimuste korral. Seetõttu muutub korralik järjestamine koordineeritud leppeks riist- ja tarkvaranõuete vahel, mitte mugavusfunktsiooniks.
4. Miks võib PMIC ajutine vastus vaikselt piirata reaalmaailma CPU-de ja GPU-de jõudlust?
Kaasaegsed protsessorid genereerivad äkilisi vooluastmeid boost-operatsiooni, AI töökoormuste, mängude puhangute ja raadioaktiivsuse ajal. Kui PMIC ei suuda nende sündmuste ajal püsivatpinget hoida, võib püsivara vähendada boost-kestust, alandada kella kiirust või laiendada ajamarginaale, et vältida kokkuvarisemisi. Paljudes toodetes piirarvutide piirangud vaikimisi piiravad jätkusuutlikku jõudlust, kuigi protsessor ise näib paberil suuteline. Stabiilne ülemineku reaktsioon mõjutab sageli kasutatavat süsteemi jõudlust rohkem kui ainult tipp efektiivsuse spetsifikatsioonid.
5. Miks tekitavad PMIC-idelt tulenevad lainetuse ja sisselülitamise müra probleeme, mis ulatuvad kaugemale toitealajõust endast?
Lülitus-harmoonilised ja laiariba müra võivad paarituda RF ringidega, ADC viidete, PLL-ide, SERDES linkide ja tundlike analoogteedega, kasutades ühist maapinget ja PCB parasitikasid. Isegi suhteliselt madalad lainetustasemed võivad vähendada ADC täpsust, suurendada faasimüra, kitsendada ajamarginaali või halvendada kiiruskommunikatsiooni usaldusväärsust. Rööbastik, mis näeb elektriliselt vastuvõetav isoleeritult, võib luua tõsiseid signaali kvaliteedi probleeme, kui see on integreeritud tihedatesse segased-signaal süsteemidesse.
6. Miks määravad PMIC-i soojuslikud piirangud sageli maksimaalset jätkusuutlikku arvutusvõimet?
Kui PMIC temperatuur tõuseb, väheneb efektiivsus ja soojuslikud kaitsemehhanismid võivad alustada kergesti saadaval oleva voolu vähendamist või käivitada tagasivaatamise käitumise. Kompaktsetes süsteemides võivad protsessorite, mälu või RF sektsioonide lähedased lokaalsed kuumad kohad sundida PMIC-i soojuslikusse alahindamisse juba enne teoreetiliste elektriliste piiride saavutamist. Selle tõttu sõltub jätkusuutlik süsteemi jõudlus sageli sama palju soojuse paigutusest, vase levikust ja pakendi valikust kui regulaatorite spetsifikatsioonidest endist.
7. Miks kombineerivad insenerid sageli buck-regulaatoreid LDO regulaatoritega tundlikes disainides?
Buck-regulaatorid pakuvad efektiivset pinget vähendamist suure voolu rööbaste jaoks, kuid toovad sisse lülitus-müra ja EMI. LDO-d genereerivad palju puhtamat väljundpinget madalama müra tasemega, kuid hajutavad suuremat soojust, kui nad alandavad suuremaid pingeid. Tavaline kompromiss kasutab buck-regulaatorit, et tõhusalt genereerida vahepealne rööbas, millele järgneb LDO, et puhastada lõplik tundlik analoog- või RF toide. See kombinatsioon tasakaalustab efektiivsust, soojuse haldamist ja müra vähendamist tõhusamalt kui sõltuda ühesugusest topoloogiast.
8. Miks peetakse PMIC-i tõrke reageerimise poliitikad osa kogu toote kogemusest?
Tõrke käitumine määrab, kas toode suleb korralikult välja, siseneb taaskäivitamise tsüklisse, piirdub kenasti või muutub ebastabiilseks ebanormaalsetes tingimustes. Ülemäärase voolu kaitse, soojuslik seiskamine, alapingetöötlus ja taastumise ajastus mõjutavad otseselt, kuidas kogemusi patarei tõrgete, kaablite probleemide või ülelaadimise sündmustega. Hästi kujundatud PMIC poliitikad isoleerivad tõrked prognoositavalt ja taastuvad kontrollitud viisidel, vähendades teeninduse keerukust ja takistades väikeste probleemide eskaleerumist süsteemsete puudujääkideks.
9. Miks toetuvad kaasaegsed PMIC-id üha enam telemeetriale ja programmeeritavatele toitepoliitikatele?
Kaasaegsed süsteemid muutuvad dünaamiliselt töökoormuse, soojuslikku seisundit, raadioaktiivsust ja laadimiskäitumist reaalajas. PMIC telemeetria võimaldab püsivara pidevalt jälgida rööbaste tingimusi, voolu tarbimist, temperatuuri ja tõrke sündmusi. See andmestik võimaldab kohanduvat pingetaset, soojuse juhtimist, intelligentset piiritustegevust ja koordineeritud kaitseotsuseid. Siiski, programmeeritavad toitesüsteemid toovad ka uusi valideerimise keerukusi, kuna vale püsivara konfigureerimine võib tekitada tõrkeid, mis ei esine fikseeritud analoogdisainides.
10. Miks liiguvad tulevased PMIC-i disainid "toite orkestreerimise" suunas, mitte lihtsalt toite konversiooni suunas?
Tulevased PMIC-id peaksid üha rohkem koordineerima efektiivsust, soojuse, EMI käitumist, kaitset, töökoormuse skaleerimist, laadimispoliitikaid ja süsteemi telemeetria samaaegselt. Kiirem lülitus tehnoloogia, kitsamad pingemarginaalid ja väga dünaamilised töökoormused nõuavad, et PMIC kohandaks pidevalt oma käitumist reaalsete töötingimuste põhjal, mitte staatiliste eelduste põhjal. See evolutsioon muudab PMIC-i aktiivseks haldussüsteemiks, mis töötab tihedalt koos püsivara ja süsteemi tarkvaraga, et hoida stabiilset, efektiivset ja prognoositavat platvormi tegevust muutuva olukorra all.
Seotud ajaveeb
-
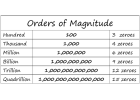
Mitu nulli miljonit, miljardit, triljonit?
![Mitu nulli miljonit, miljardit, triljonit?]()
2024/07/29
Miljon tähistab 106, hõlpsasti haaratav näitaja, võrreldes igapäevaste esemete või iga -aastaste palkadega. Miljard, samaväärne 10 -ga9, hakka... -
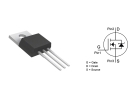
IRLZ44N MOSFET andmelehel, vooluring, samaväärne, pinout
![IRLZ44N MOSFET andmelehel, vooluring, samaväärne, pinout]()
2024/08/28
IRLZ44N on laialt kasutatav N-kanali võimsus MOSFET.Oma suurepäraste vahetusvõimaluste poolest tuntud see sobib väga paljude rakenduste jaoks, eri... -
Aku temperatuur on liiga madal, laadimine peatus.Kuidas seda parandada?
![Aku temperatuur on liiga madal, laadimine peatus.Kuidas seda parandada?]()
2024/10/6
Mobiiltelefoni aku laadimisprobleemid on tavalised, kuid neid saab tõhusalt hallata.Temperatuur mängib suurt rolli aku efektiivsuses, kuna nutitelef... -
BC547 transistori põhjalik juhend
![BC547 transistori põhjalik juhend]()
2024/07/4
BC547 transistorit kasutatakse tavaliselt erinevates elektroonilistes rakendustes, alates põhisignaali võimenditest kuni keerukate ostsillaatori voo... -
SCR põhjalik juhend (räni juhitav alald)
![SCR põhjalik juhend (räni juhitav alald)]()
2024/04/22
Räni kontrollitud alaldid (SCR) ehk türistorid mängivad oma jõudluse ja usaldusväärsuse tõttu elektrienergia tehnoloogias keskset rolli.Selles ... -
LR621, SR621SW, 364, AG1 aku ekvivalendid ja asendajad
![LR621, SR621SW, 364, AG1 aku ekvivalendid ja asendajad]()
2024/07/15
LR621 ja SR621SW nupud akud on levinud kompaktsetes elektroonikaseadmetes, nagu kellad, väikesed mänguasjad, kalkulaatorid ja kaugvõtmed.Mitu tootj... -
OP-AMP-vooluringide põhialused
![OP-AMP-vooluringide põhialused]()
2023/12/28
Elektroonika keerulises maailmas viib teekond oma saladustesse alati nii peen kui ka keeruka vooluringi komponentide kaleidoskoobi juurde.Selle valdko... -
Täielik juhend multiplekseritest ja nende roll digitaalsüsteemides
![Täielik juhend multiplekseritest ja nende roll digitaalsüsteemides]()
2025/09/20
Multiplekserid on komponendid digitaalsüsteemides, mis on loodud mitme sisendsignaali suunamiseks üheks väljundliiniks, kasutades binaarseid loogik... -
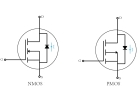
NMO -de ja PMOS -i erinevuste ja rakenduste võrdlemine
![NMO -de ja PMOS -i erinevuste ja rakenduste võrdlemine]()
2024/11/15
NMO -de ja PMOS -transistoride erinevuste mõistmine on oluline tõhusate vooluringide kavandamisel.NMOS (N-tüüpi metalli-oksiid-semonductor) ja PMO... -
CR2450 vs CR2032 Võrdlus: kõik, mida peate teadma
![CR2450 vs CR2032 Võrdlus: kõik, mida peate teadma]()
2025/09/15
Nupp -patareisid nagu CR2450 ja CR2032 toidavad palju igapäevaseid elektroonikaid, alates kelladest ja kaugjuhtimisest kuni meditsiiniliste ja töös...





Kuumad osad
- NL71024DFMH-266
- LM34919TL
- X9279TV14-2.7T1
- LTC1690IS8#PBF
- IDT72205LB15PF
- TMS471R1VF34A2FPZR
- BR24G02FVT
- VI-B53-CW/F2
- EPM240GT100C5N
- DSPB56362AG120
- MPQ7091
- FZT651TA
- LT3475EFE#TRPBF
- TC9349AFG-110
- 12065C154KAT4P
- LTC2858CMS-1#PBF
- BTA40-600B
- AEICC4277229MCY
- C3216X5R2E104M160AA
- 1MBI150SH-060
- 08051A2R7DAT2A
- 2SB1316
- C1608X6S1H154M080AB
- AP4953GM
- AM29LV320MB120EIT
- S29AL004D70BFI010E
- GRM0336T1E4R9CD01D
- TPSW107M010R0150
- OPA684ID
- ACS710KLATR-12CB-T
- PIC32MX795F512L-80I/PF
- PMB5724FV1.1
- ICS9P750CG
- SI5326B-C-GMR
- NCP6131NS52MNR2G
- XCS1OXL-VQ100AKP
- MAX6457UKD3B+T
- T491D107M006AT4839
- RFM-0505S
- T491B475K010AT7454
- AL-251A-T-0
- GWIXP425ABBT
- MT41K256M16RE-125:D
- ADC12L038
- PEF24471EV1.3G
- VP17042-3
- PNX0161ET101TM
- RVT1H101M1010
- VI-2N1-EW/F2
- MAX33040EAKA+T